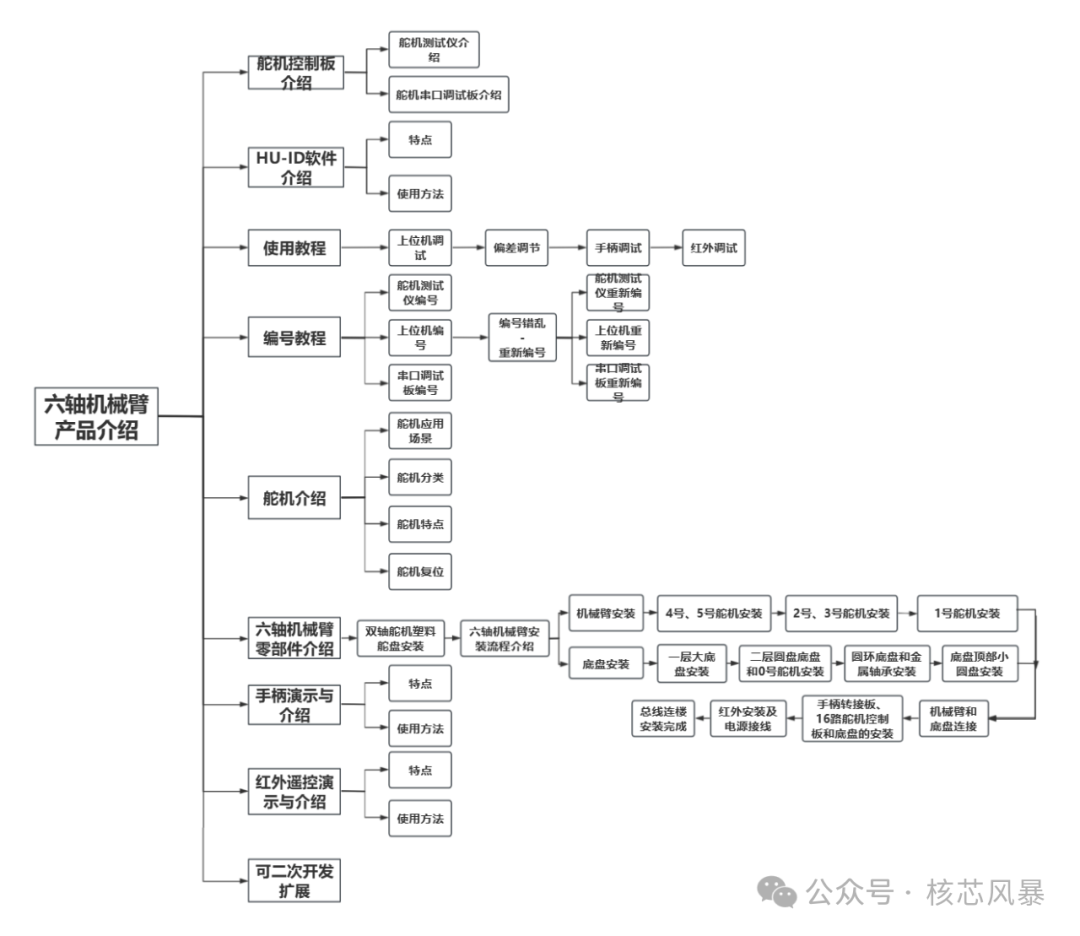
↓六轴机械臂使用教程↓

开始安装之前,需要先进行舵机复位,把所有舵机都串联起来,接到16路舵机控制板上,给16路舵机控制板接上电源(注意正负极),开启开关,即可复位。复位之后不要旋转齿轮,否则安装之后会有偏差。如果不小心旋转到齿轮,请对单个舵机再次复位,再进行安装!(具体可看复位视频教程)

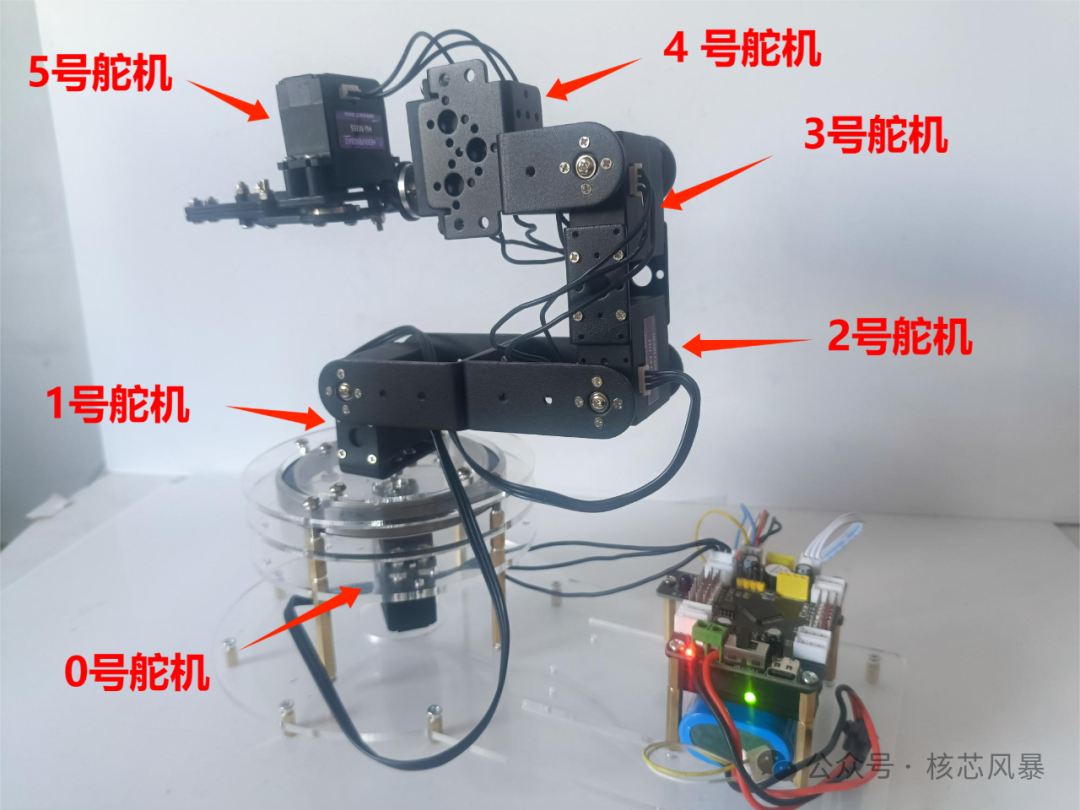
三、六轴机械臂器件

四、双轴舵机舵盘的安装
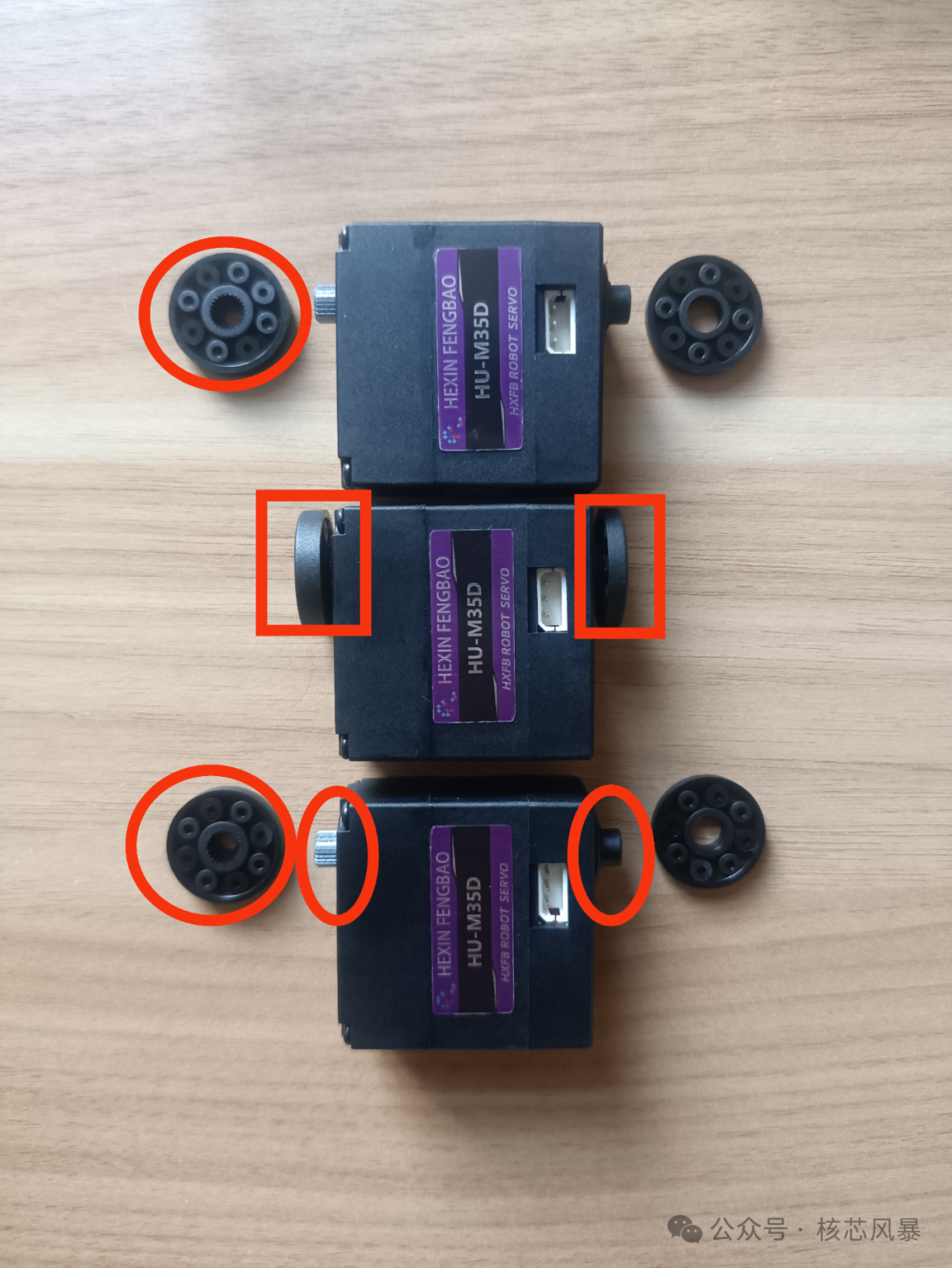
打开双轴舵盘配件包,偏厚并且里面有齿轮的为主舵盘,偏窄里面没有齿轮的为从舵盘,安装时注意舵盘的小孔位一定要尽量保持横平竖直,主舵盘安装在双轴舵机有齿轮一侧(如图所示舵机左侧),从舵盘安装在双轴舵机没有齿轮一侧(如图所示舵机右侧)。(塑料舵盘和金属舵盘有区别,金属舵盘连接的是单轴舵机,塑料舵盘连接的为双轴舵机,金属舵盘的安装方式不同,在安装过程中进行说明)
(双轴舵机配件包:注意区分M3*5自攻螺丝和圆头M3*5螺丝,自攻螺丝为银色,安装在双轴舵机从舵盘一侧,圆头M3*5螺丝安装在双轴舵机主舵盘一侧)
五、六轴机械臂安装教程-机械臂安装
安装时如果复位之后一定不要转动齿轮,如有转动,请对转动的舵机进行单独复位之后,再进行六轴机械臂的安装。
(1)拿出4号舵机与金属舵盘(主)连接,并用单轴舵机配件包里面的M3螺丝固定。

(2)把固定好的4号舵机,用金属舵盘配件包里面的M3螺丝和合金机械爪固定在一起,注意合金机械爪安装的方向。


(3)再拿出5号舵机,卡在合金机械臂内,并拧上M3圆头螺丝。
(4)拿出金属舵盘配件包,用M3螺丝把金属舵盘、合金机械爪和5号舵机锁在一起


(5)拿出稍短的串行总线舵机连接线,在舵机背面(4号贴字的一侧)进行连接。

(6)取出多功能支架和短U支架,用圆头M3螺丝和M3螺母锁紧,注意锁的孔位。

(7)用M4短螺丝和M4螺母把安装好的支架和机械臂连接起来。(注意HU-M35S贴纸在正面,稍短的串行总线舵机连接线在背面)

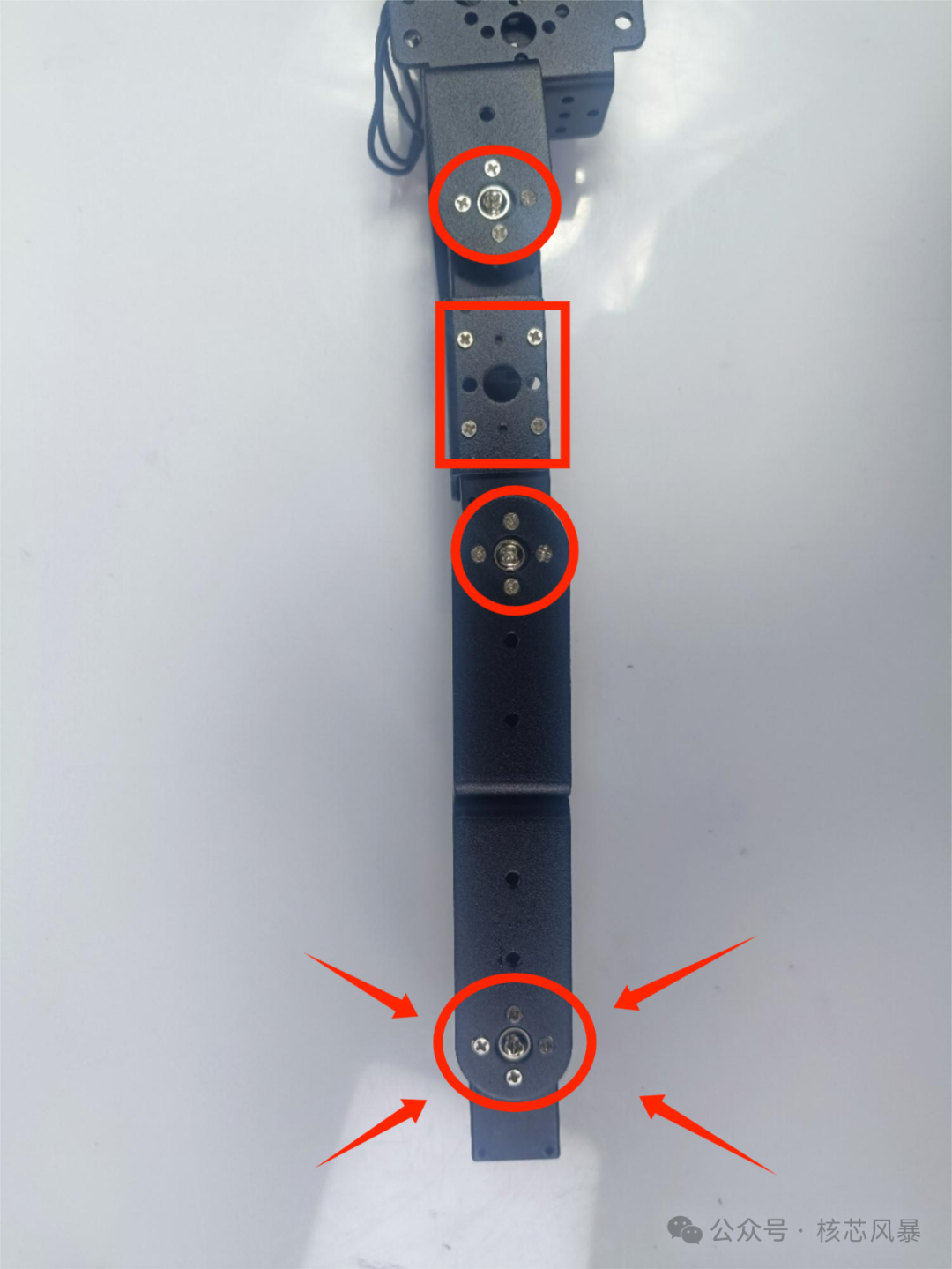
(8)拿出3号舵机和双轴舵机配件包,先拧双轴舵机配件包里面的M2平头螺丝固定在短U支架上。然后再拧中间圆头的M3螺丝,(注意圆头螺丝在舵机型号贴字的一侧),固定塑料舵盘(主),后拧银色M3自攻螺丝,固定塑料舵盘(从)。

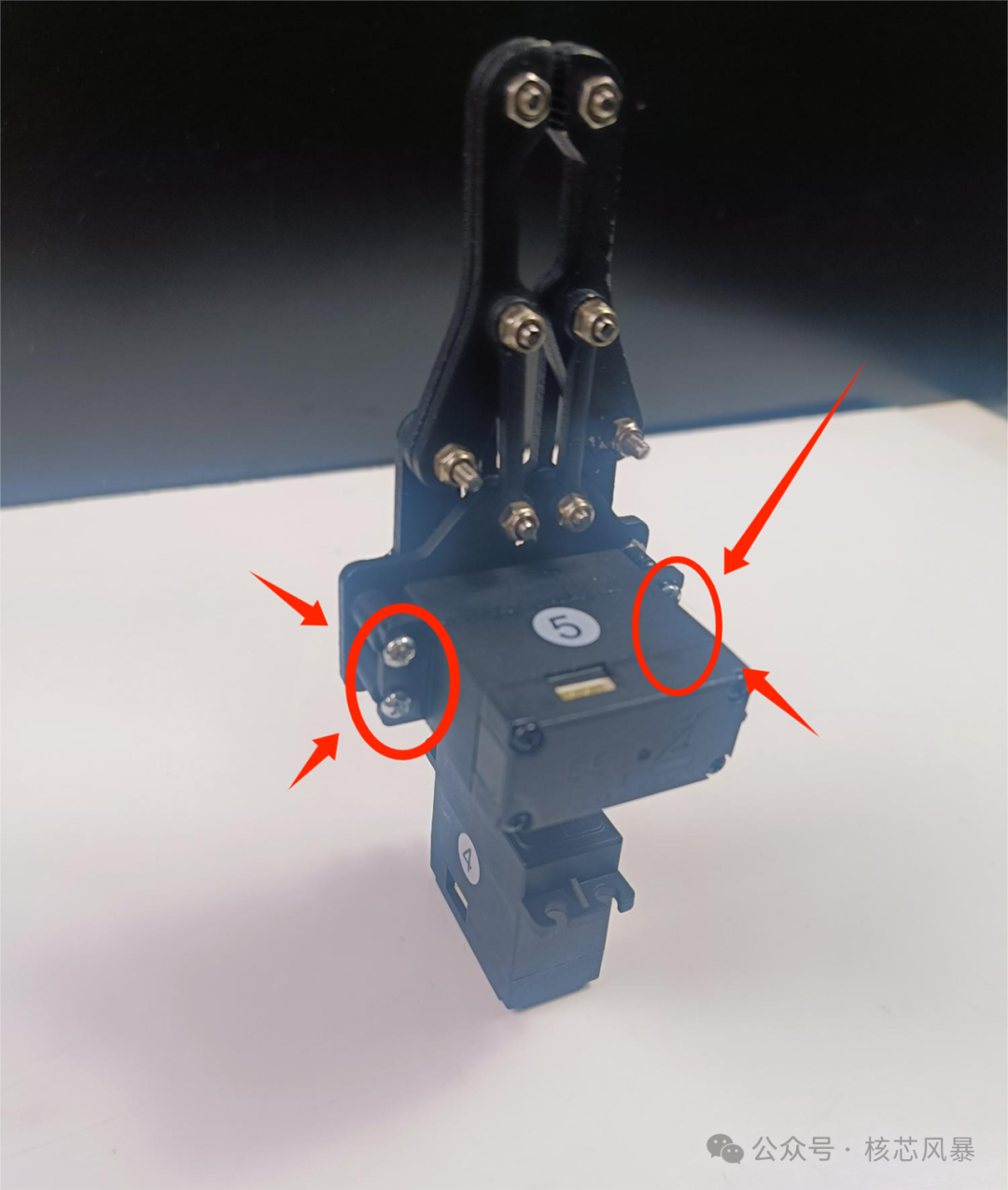
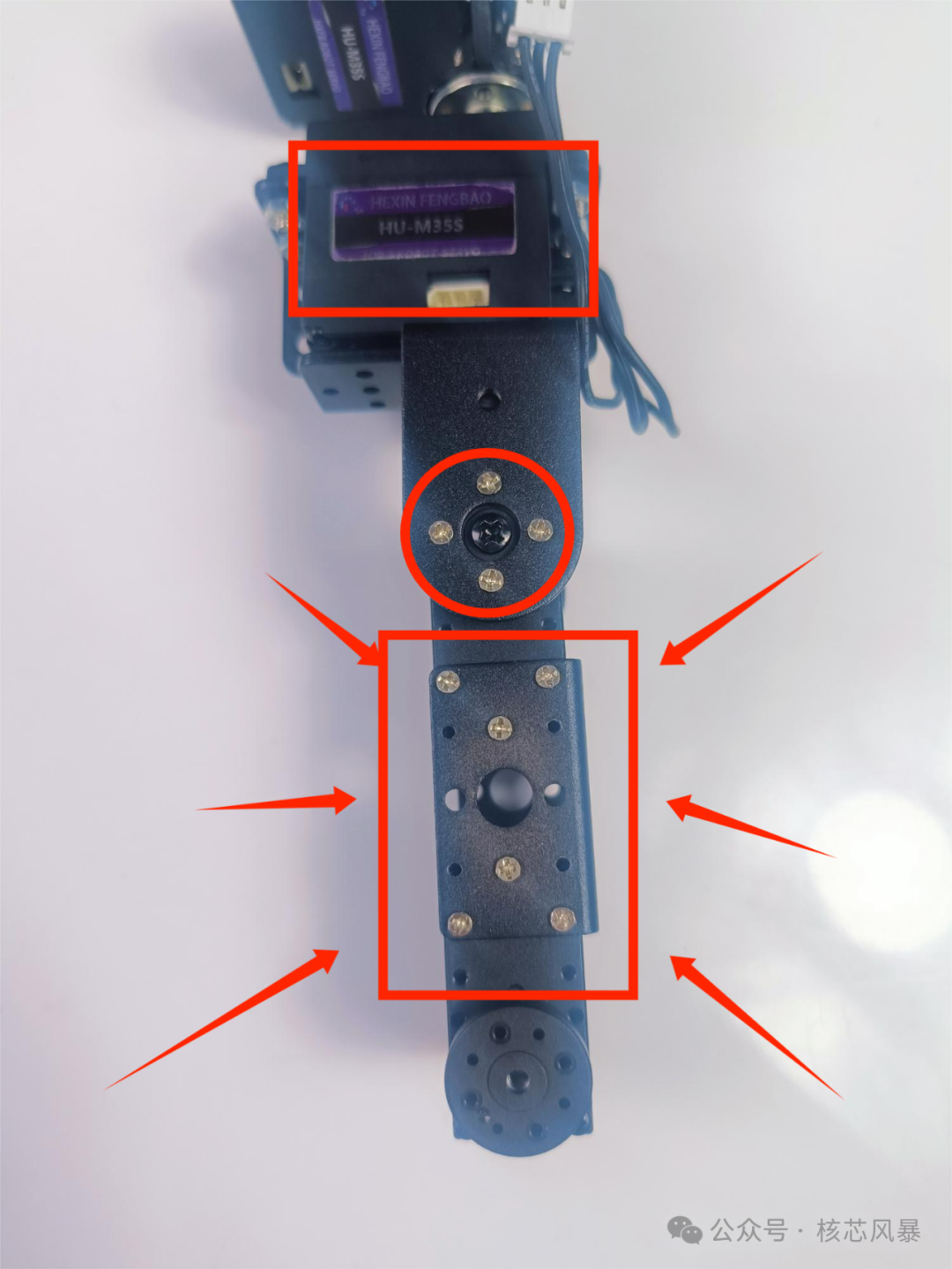
(9)安装小U连接件,拿出2号舵机,按照图中所示,有箭头的一侧为连接侧,把六颗M2平头螺丝按照图中顺序锁在有贴舵机型号贴字的一侧,4颗M2平头螺丝按照图中顺序锁在另外一面。
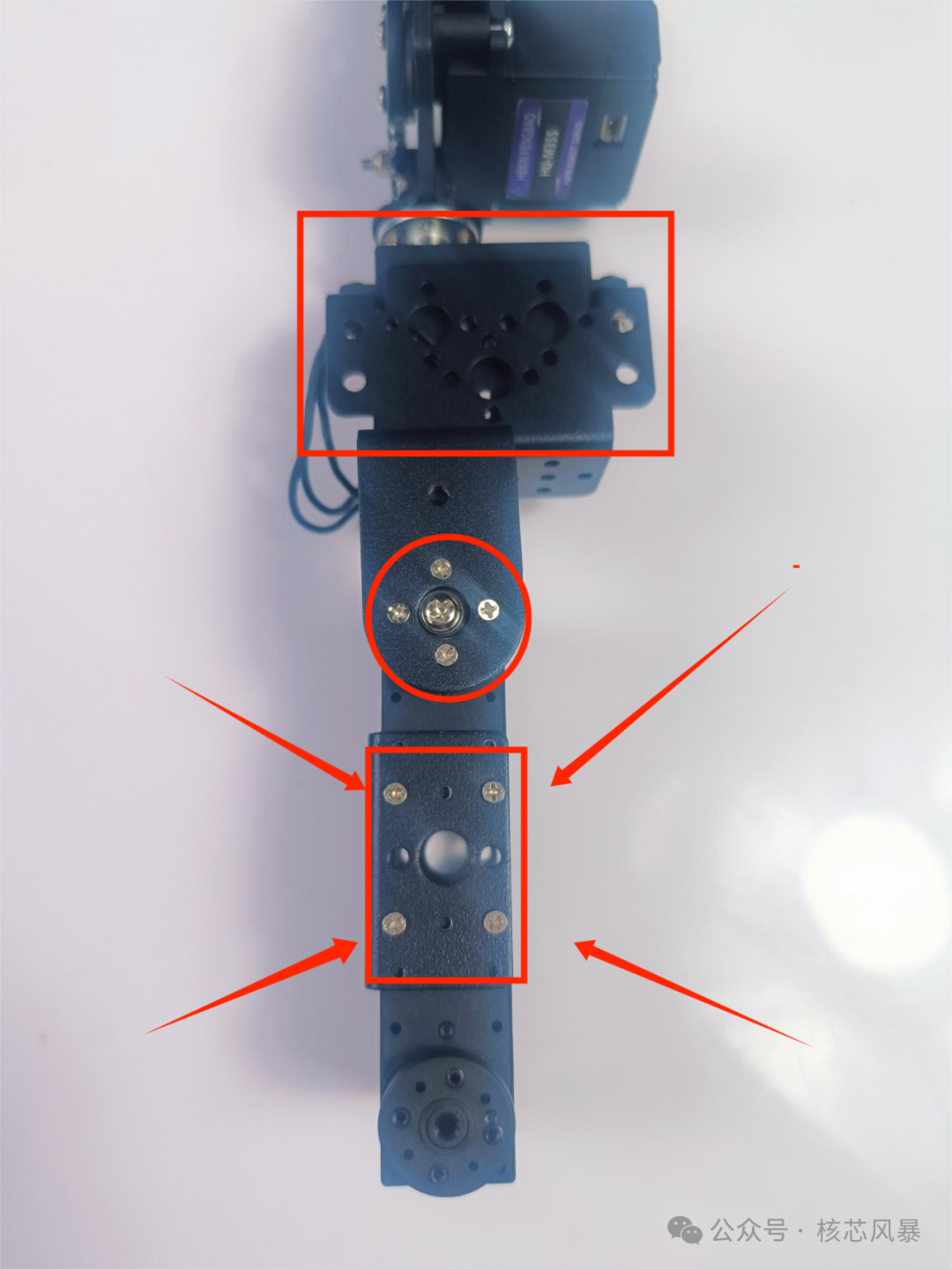
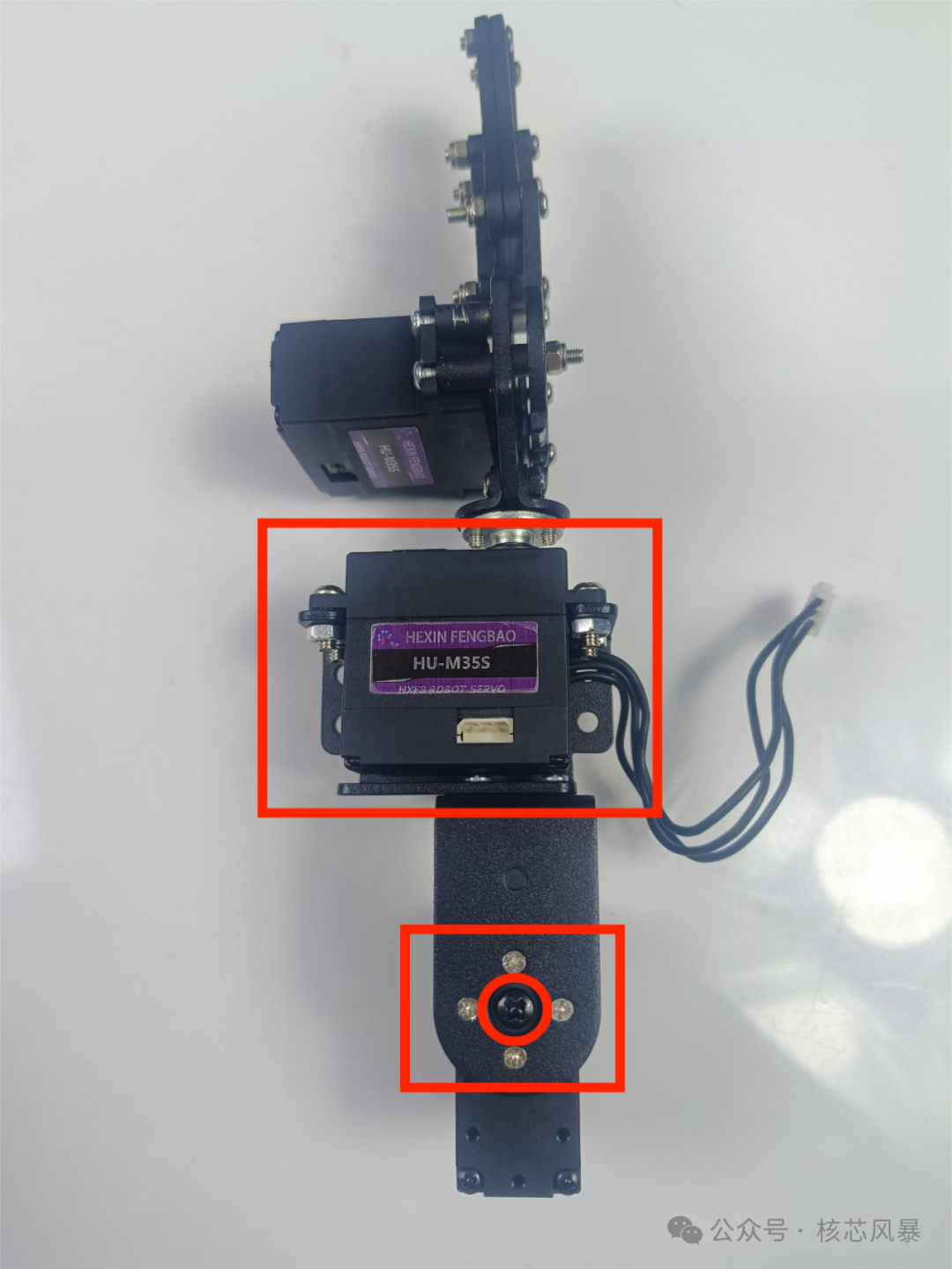
(10)拿出两个长U支架,用4颗圆头M3螺丝和M3螺母锁在一起。

(11)把固定好的长U支架与我们锁好的机械臂连接在一起,拿出双轴舵机配件包里面的螺丝,先固定图中的M2平头螺丝,拧紧之后固定M3圆头螺丝,固定完成之后再固定M3银色自攻螺丝。


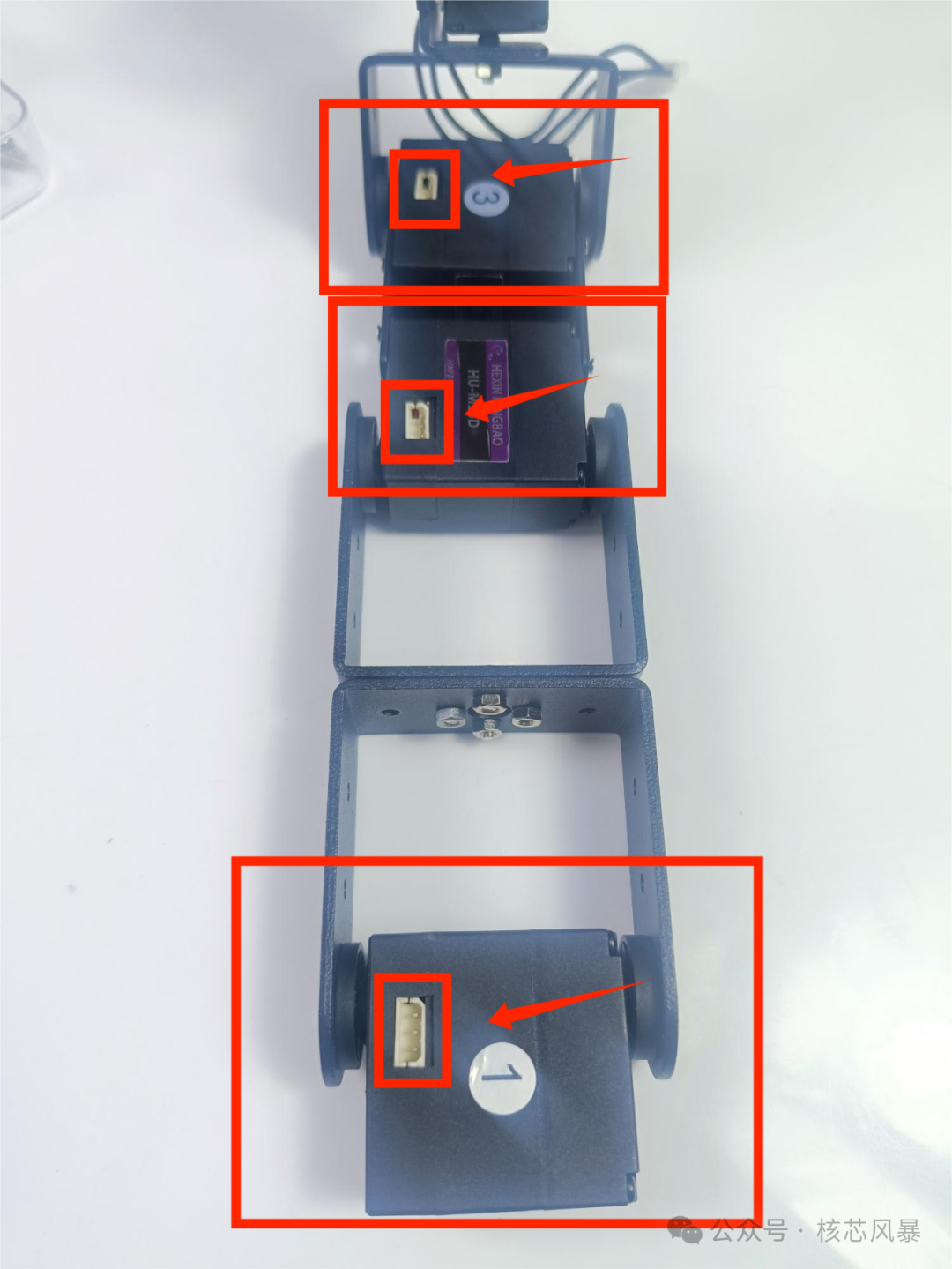
(12)再拿出1号舵机,放在最下面,注意总线接口的方向与图中的2号舵机和3号舵机对应,一定不要装反!
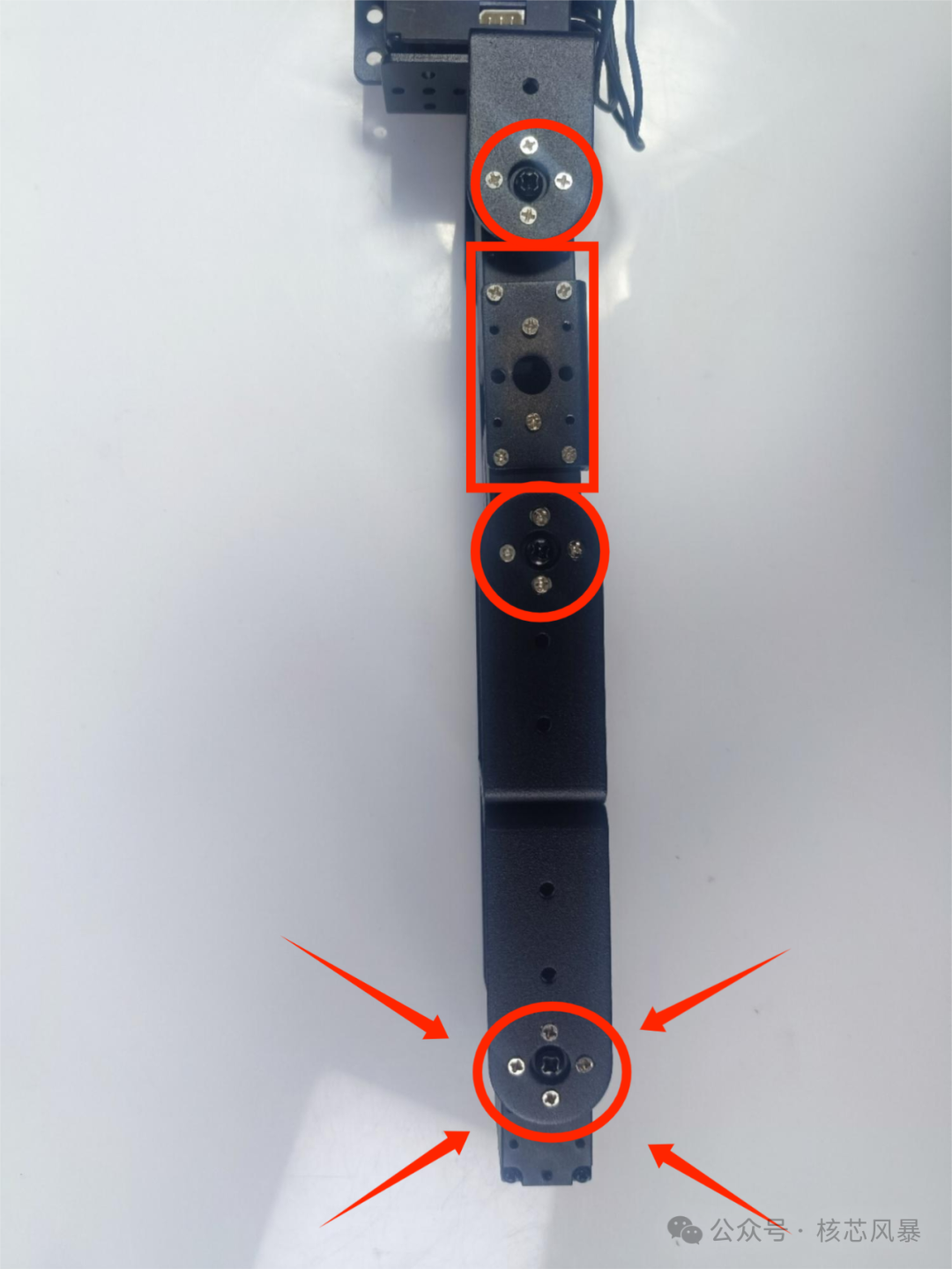
(13)取出双轴舵盘配件包里面的M3圆头螺丝,与上面2号舵机的圆头螺丝想对应,先固定M2平头螺丝,再固定M3圆头螺丝。取出双轴舵盘配件包里面的M3银色自攻螺丝,与上面2号舵机的银色自攻螺丝想对应,先固定M2平头螺丝,再固定M3银色自攻螺丝。
六、六轴机械臂安装教程-底盘安装
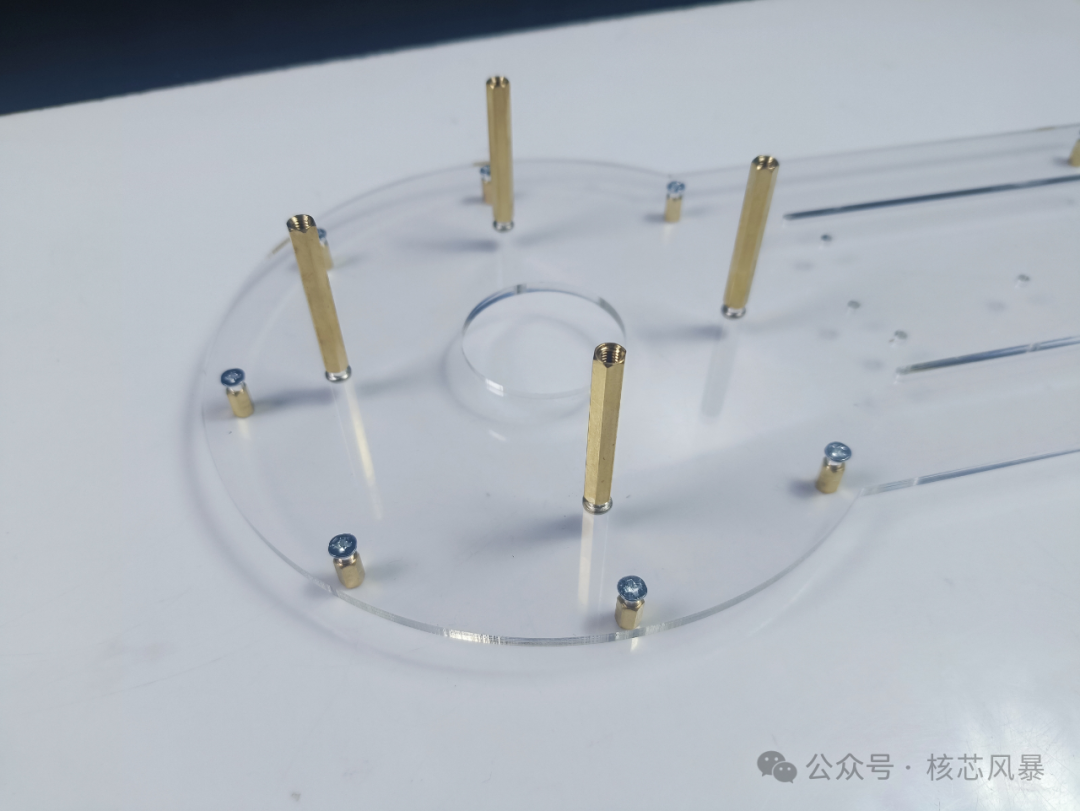
(1)拿出一层底盘,用平头M3螺丝和9个长度一样的M3双通铜柱进行固定。
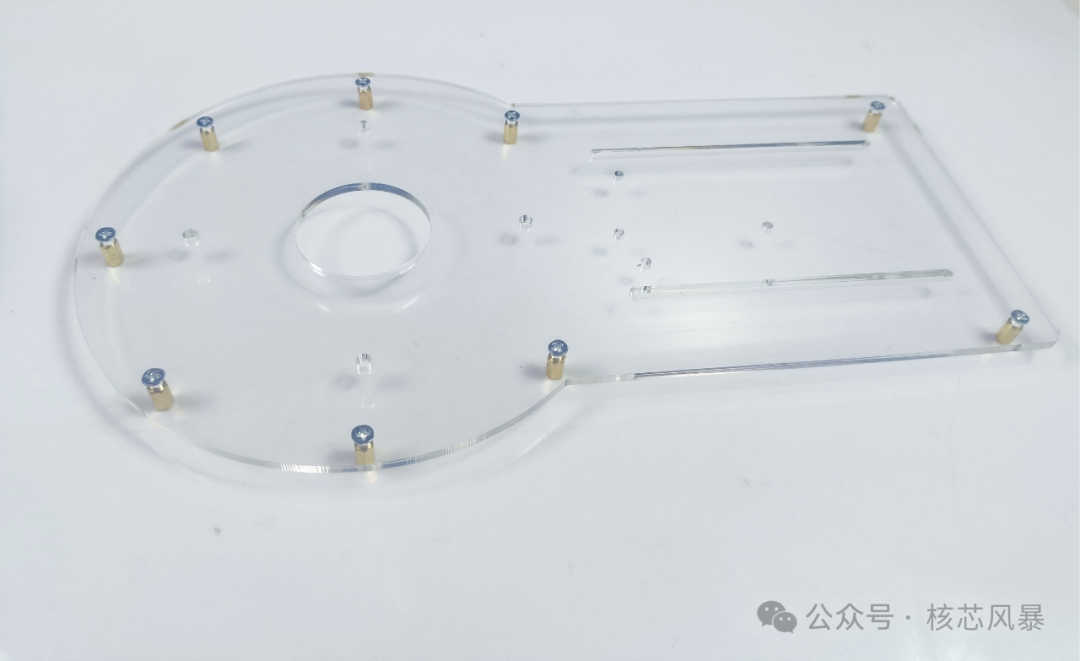
(2)使用最长的M4双通铜柱和M4短螺丝进行固定。
(3)拿出0号舵机,取出一个二层的底盘,用M4短螺丝和M4螺母把舵机和圆形底盘安装在一起。(二层圆形底盘在上面,0号舵机在下面)
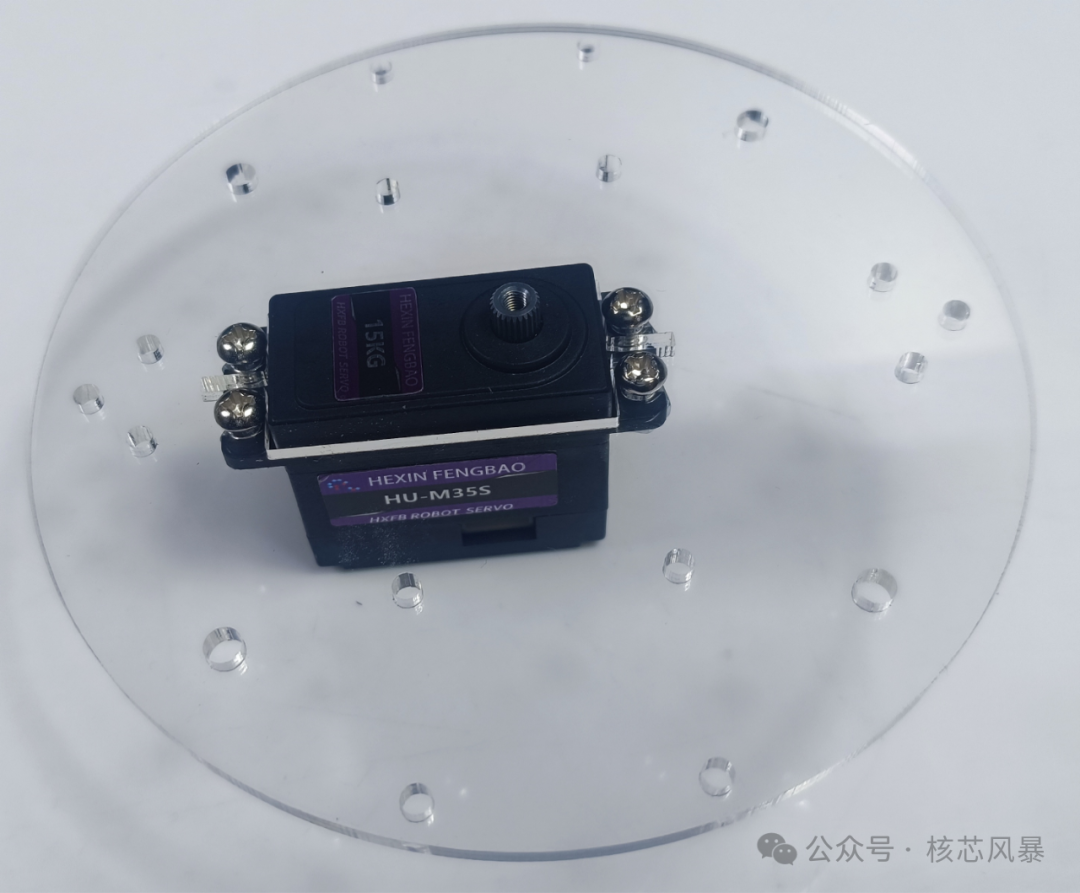
(4)用M4单通铜柱,把一层底盘的铜柱和二层底盘固定起来(注意图中0号舵机方向)。
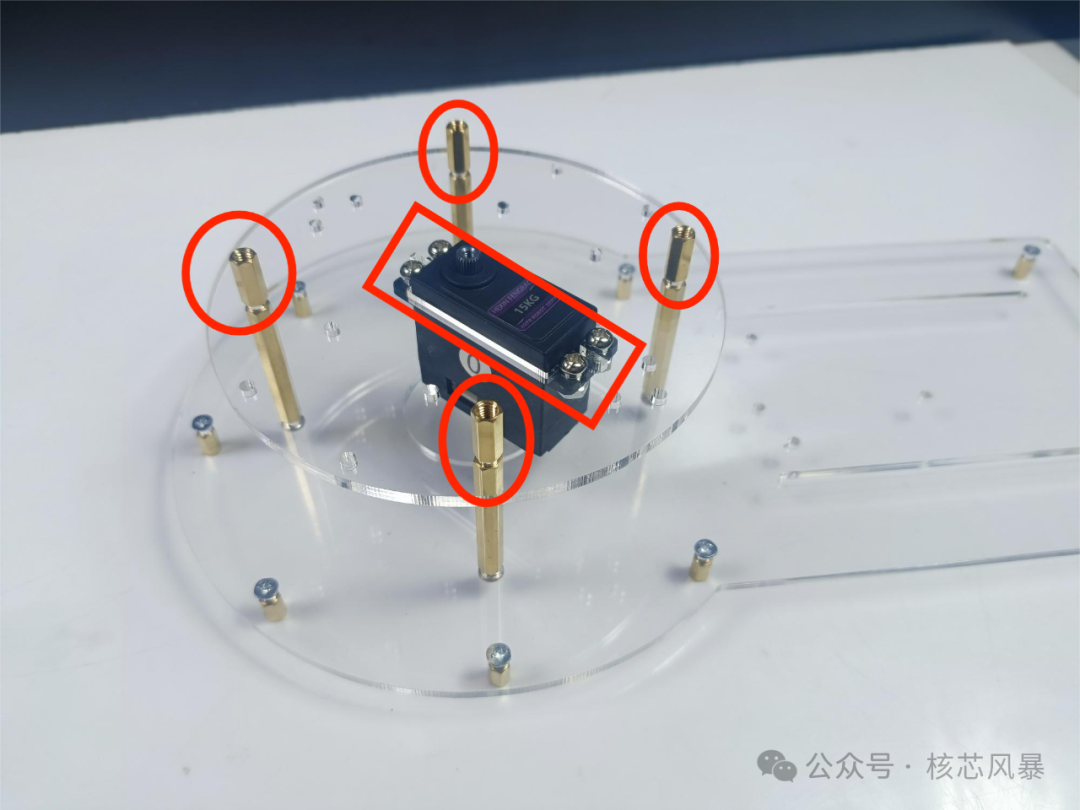
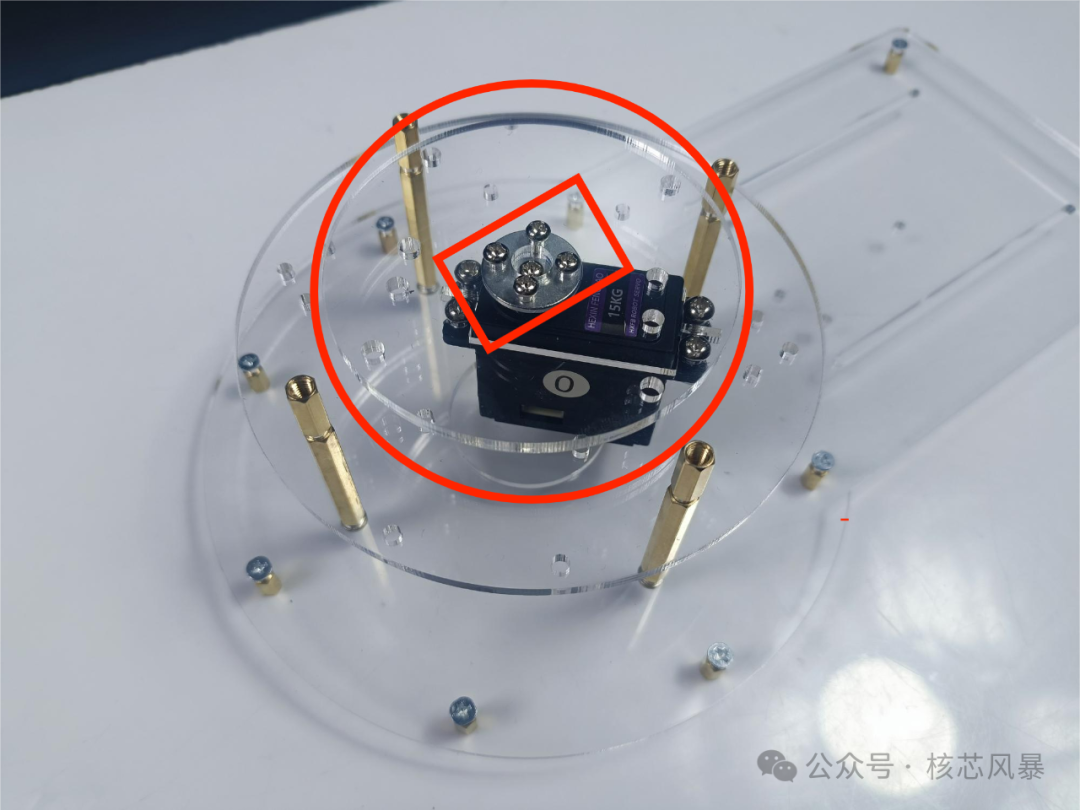
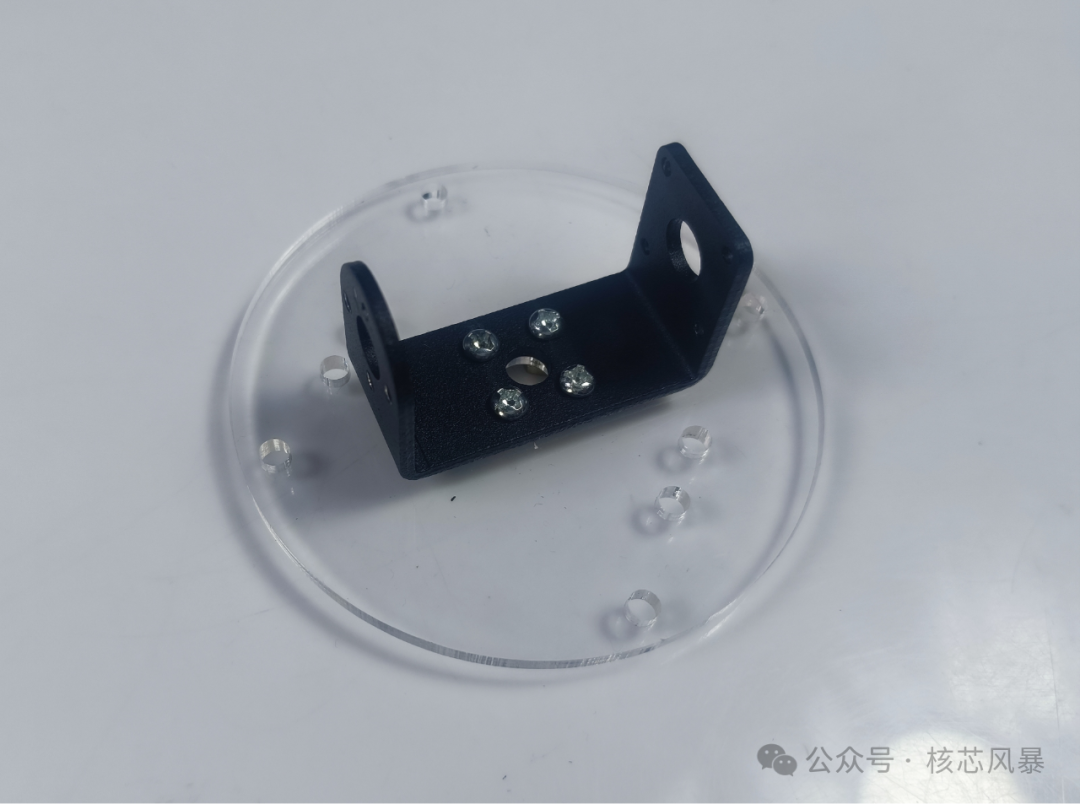
(5)取出小的圆形底盘,用单轴舵机配件包里面的M3螺丝固定在金属舵盘上(注意方向:4个螺丝的安装一定要与底盘保持水平)。
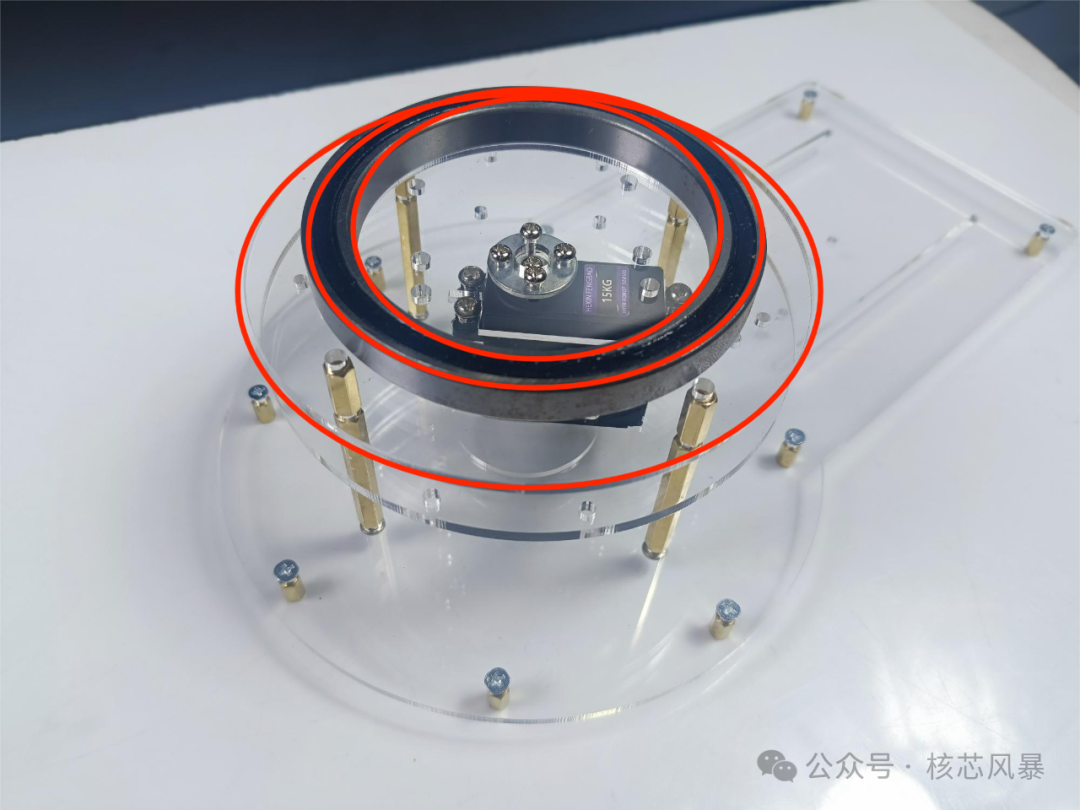
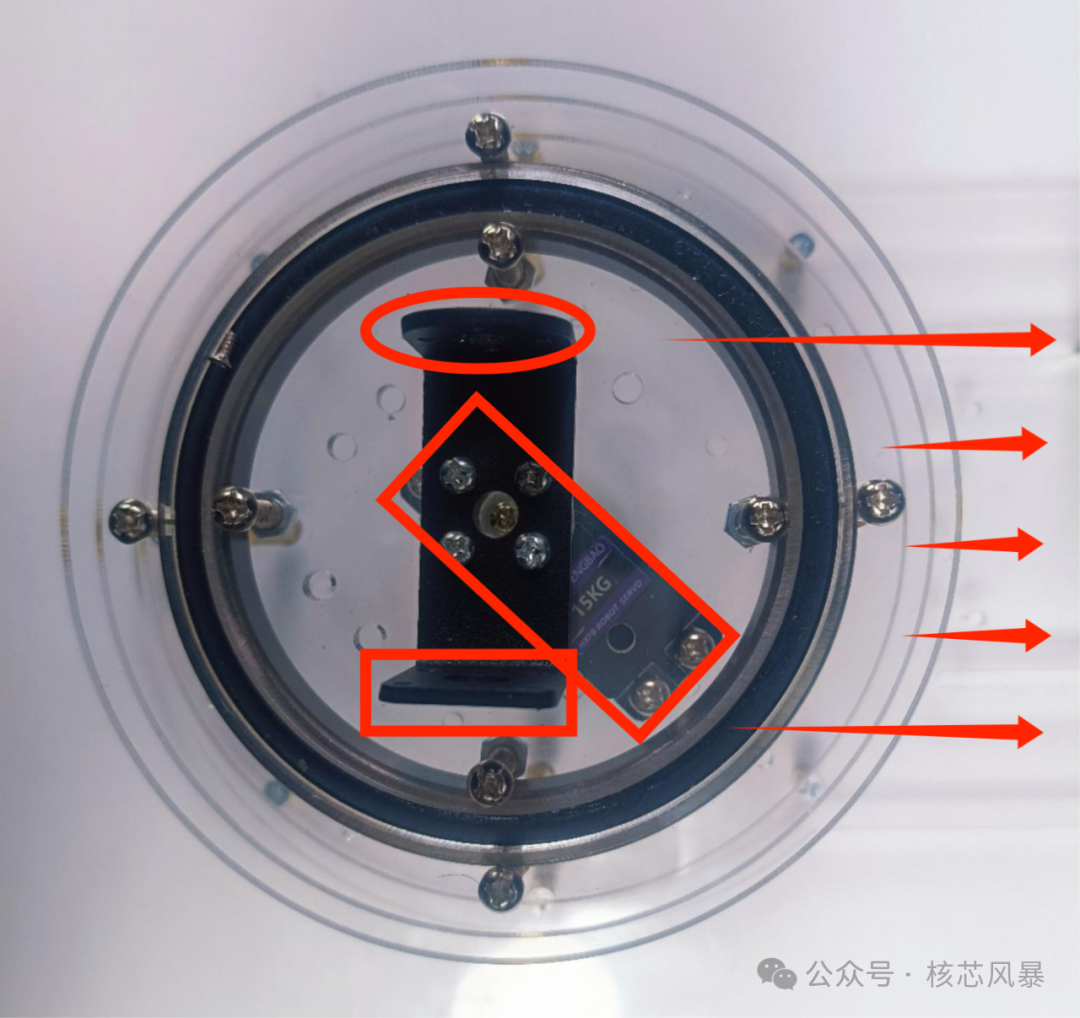
(6)先取出一个圆环对准孔位,放在底盘上,然后拿出轴承,把轴承放在圆环之上。
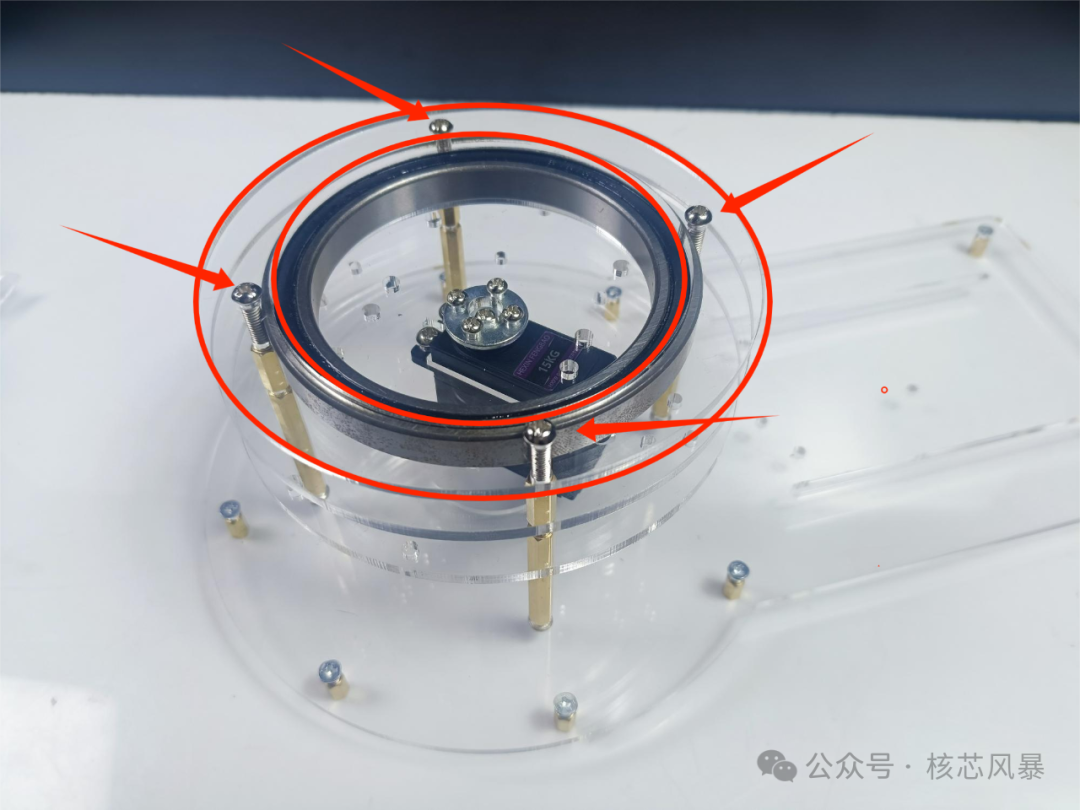
(7)再取出一个圆环放在金属轴承上面,对准孔位之后取出M4长螺丝进行固定。
(8)取出小的圆形底盘和窄U支架,用圆头M3螺丝和M3螺母进行固定。
(9)注意窄U支架平的一面在下面,圆的一面在上面,与下方0号舵机对应,一定不要装反,确认无误之后,对准孔位用M4长螺丝和M4螺母固定。
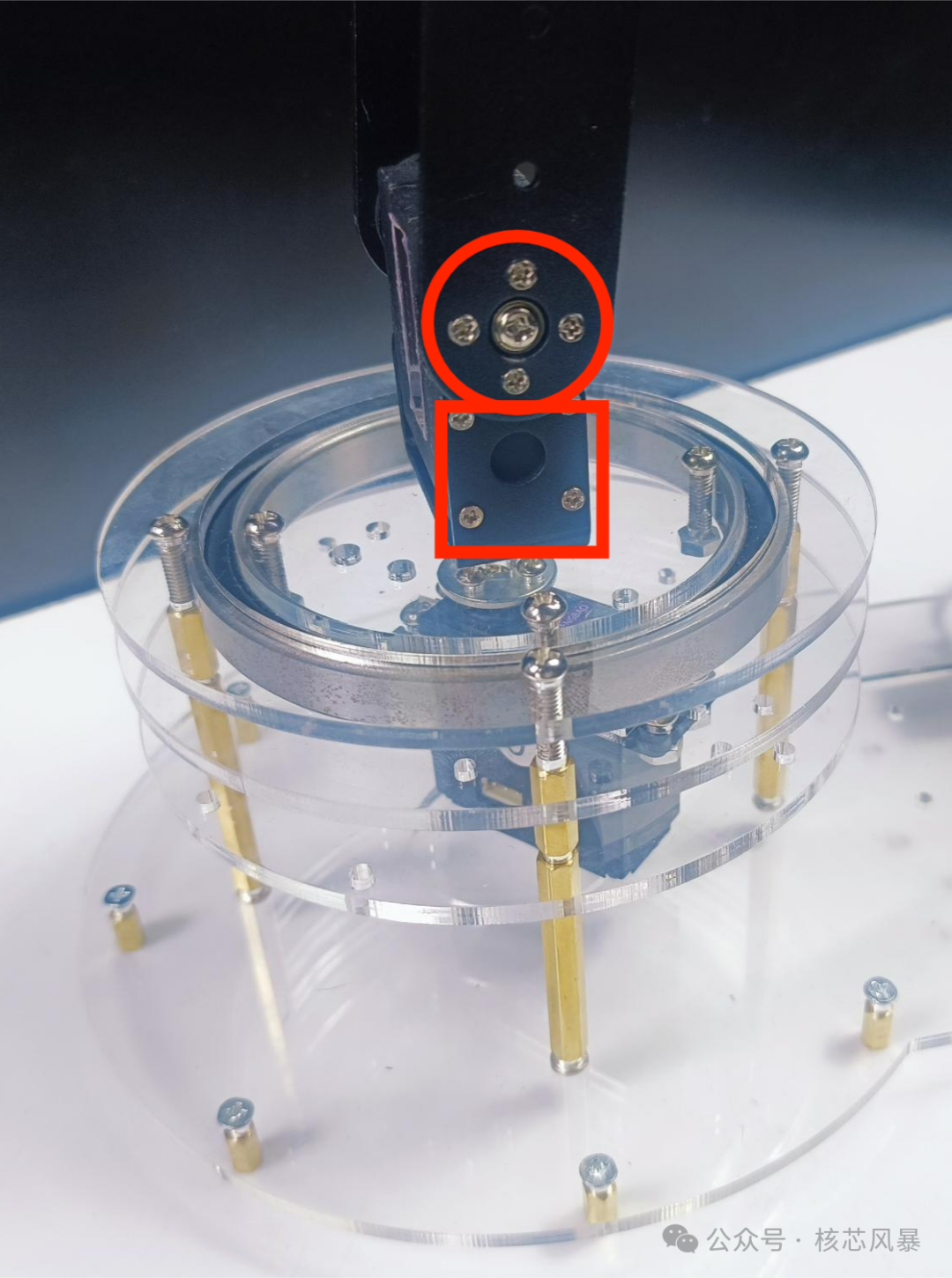
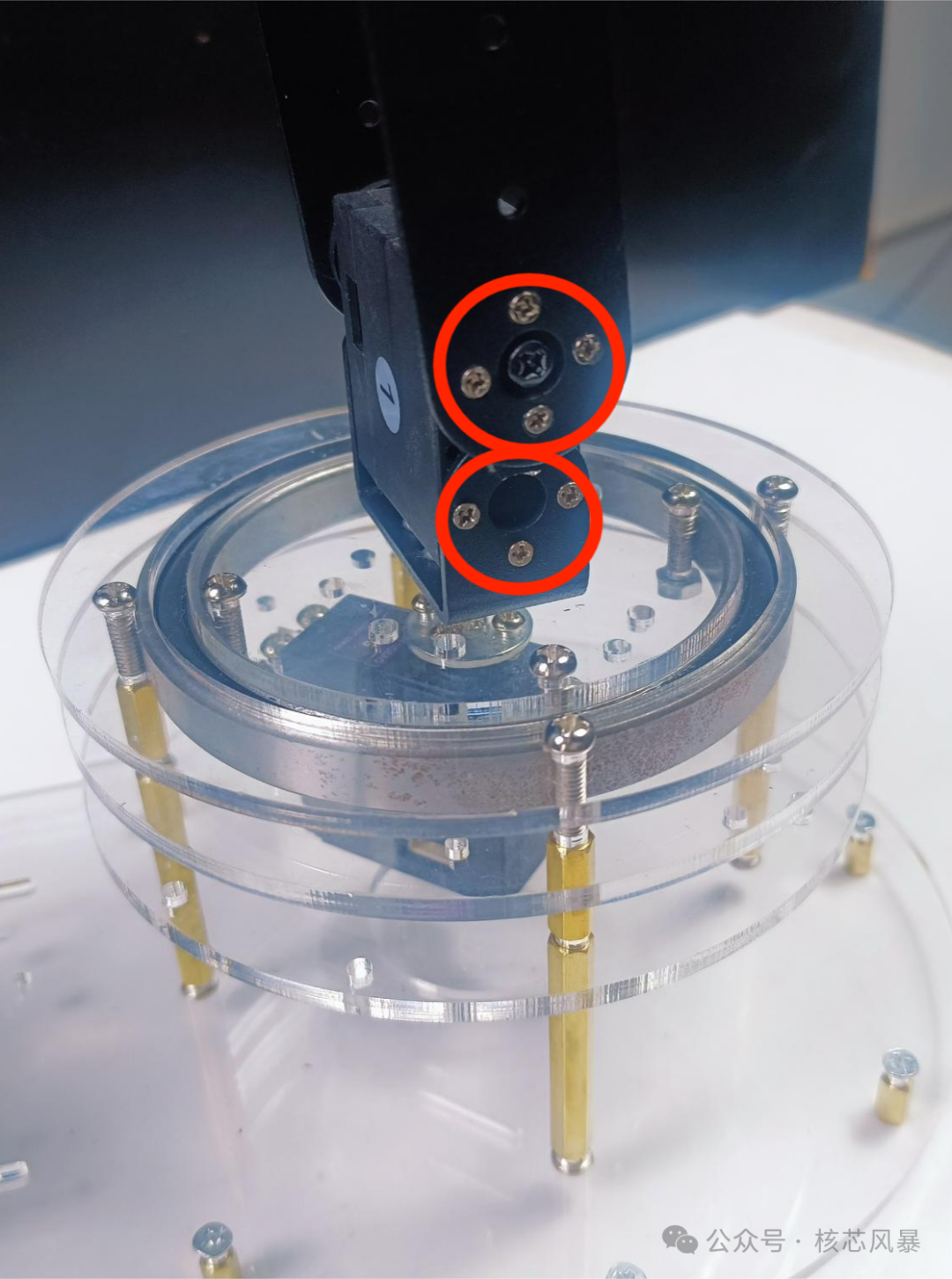
(10)把机械臂和底盘连接在一起,注意方形的安装在银色自攻螺丝的一侧,圆形安装在圆头螺丝的一侧,拧上M2平头螺丝即可。(一定不要装反!!!)
(11)用圆头M3螺丝和M3单通铜柱如图所示进行固定取出手柄转接板,对准孔位,卡在里面。
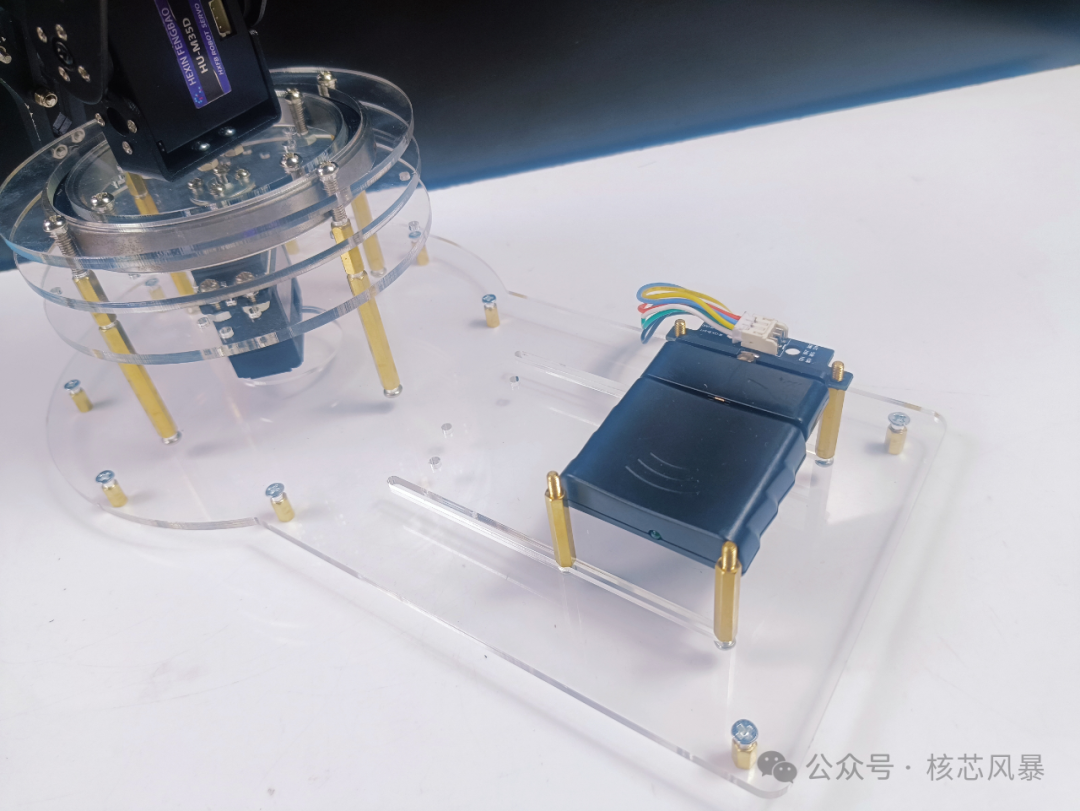
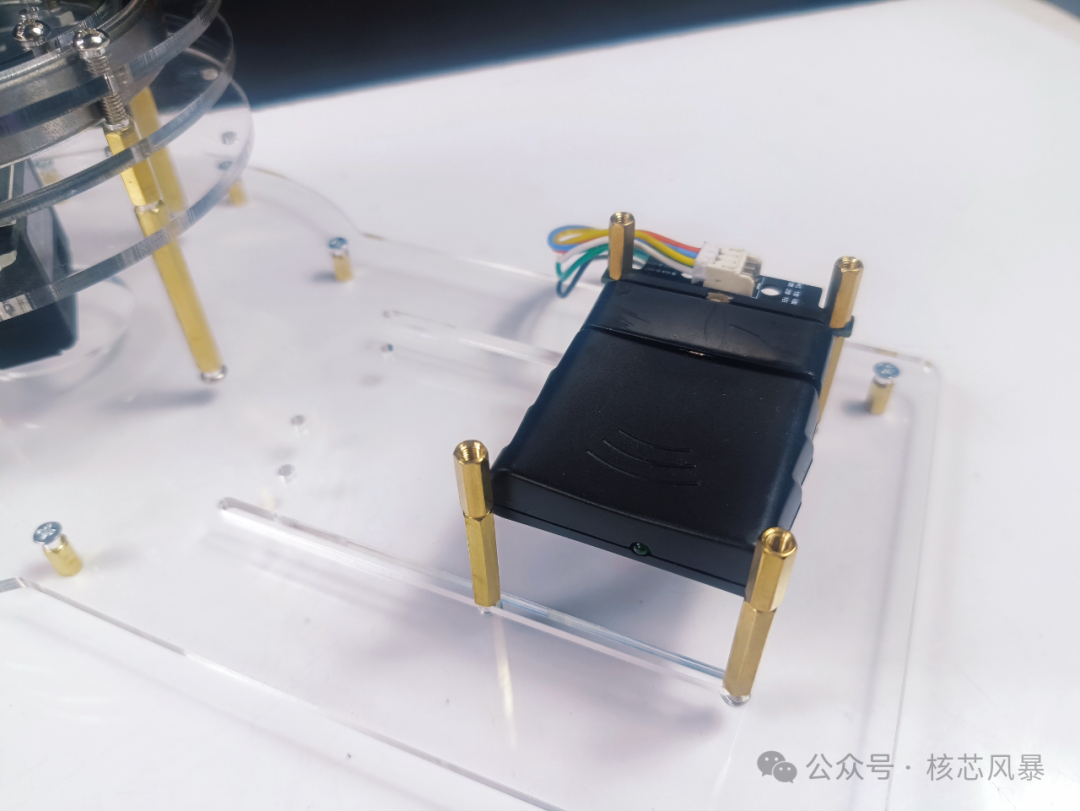
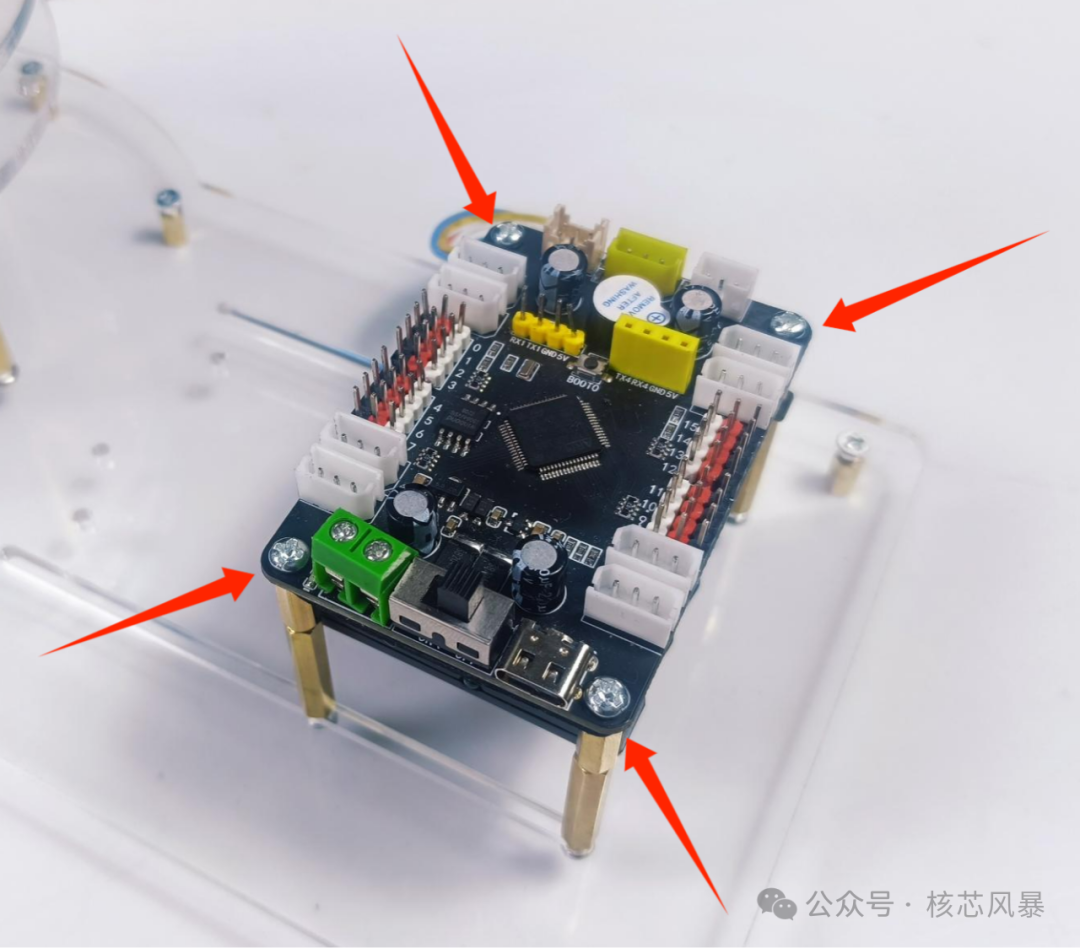
(13)把16路舵机控制板对准孔位,卡在里面,然后用M3螺丝拧紧。(注意图中16路舵机控制板方向)
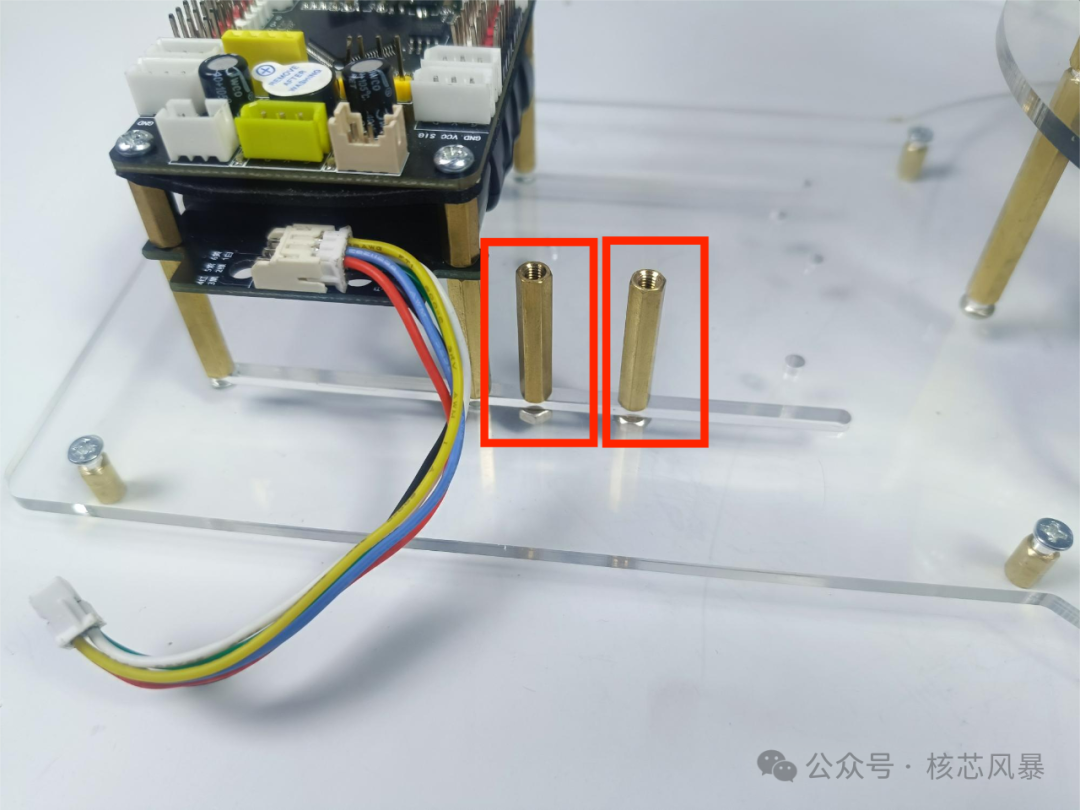
(14)拿出两个M3单通铜柱和圆头M3螺母,按图中的间距锁紧。
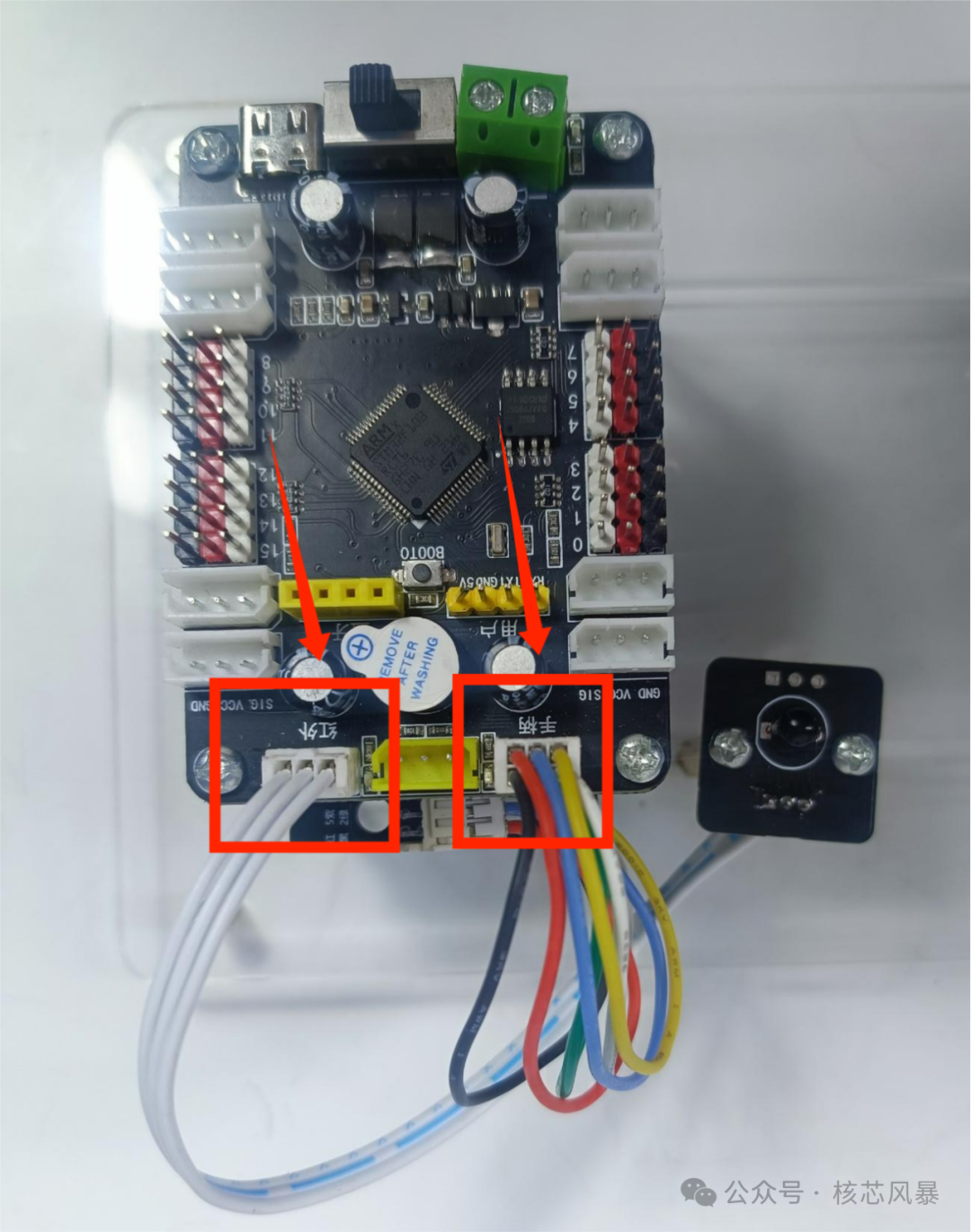
(15)把红外转接板放到M3单通铜柱上,并用M3圆头螺丝锁紧。
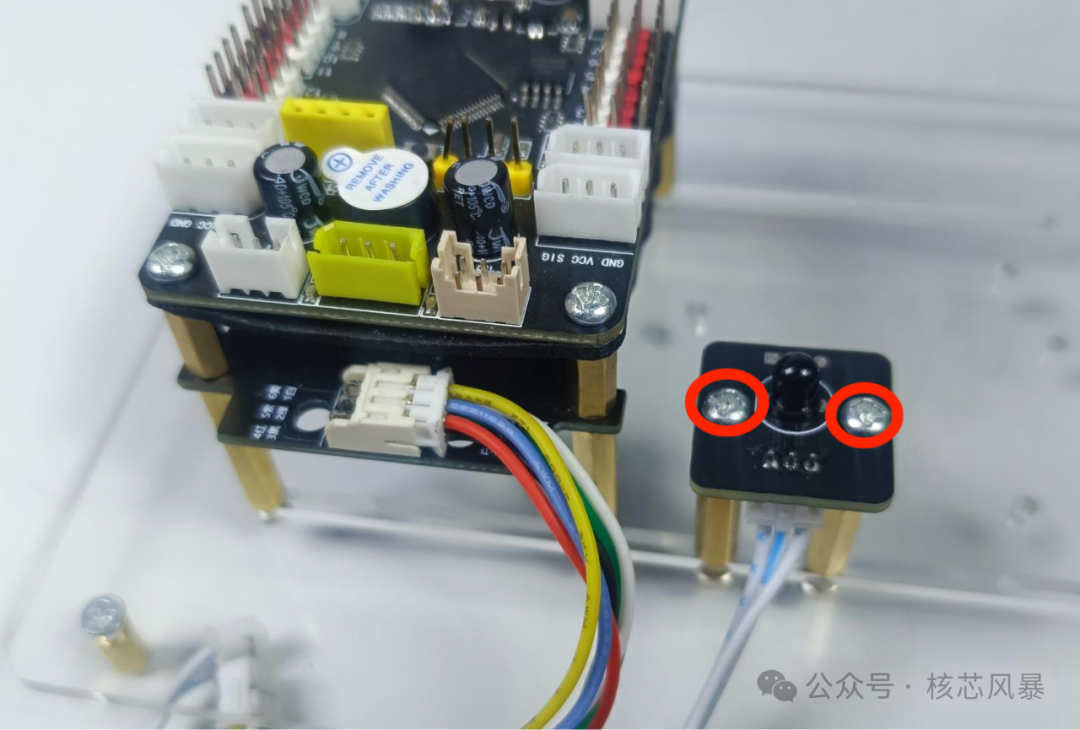
(16)把红外和手柄连接线连接到16路舵机控制板对应丝印的位置。
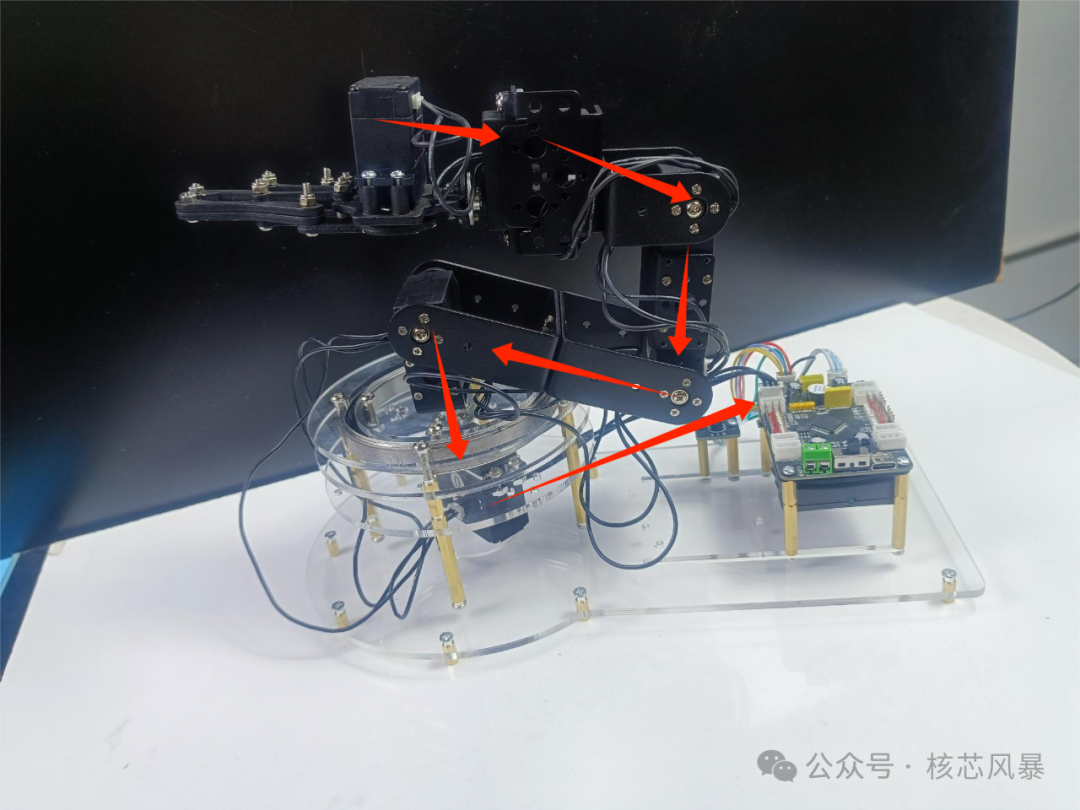
(17)安装完成之后,0号舵机和1号舵机之间、1号舵机和2号舵机之间为长总线连接线,剩余4个为短总线连接线,把每根总线舵机连接线都进行串联(注意区分正反),最后再接到16路舵机控制板八个总线接口其中一个。
七、六轴机械臂使用教程
第一课 电源接入的方法
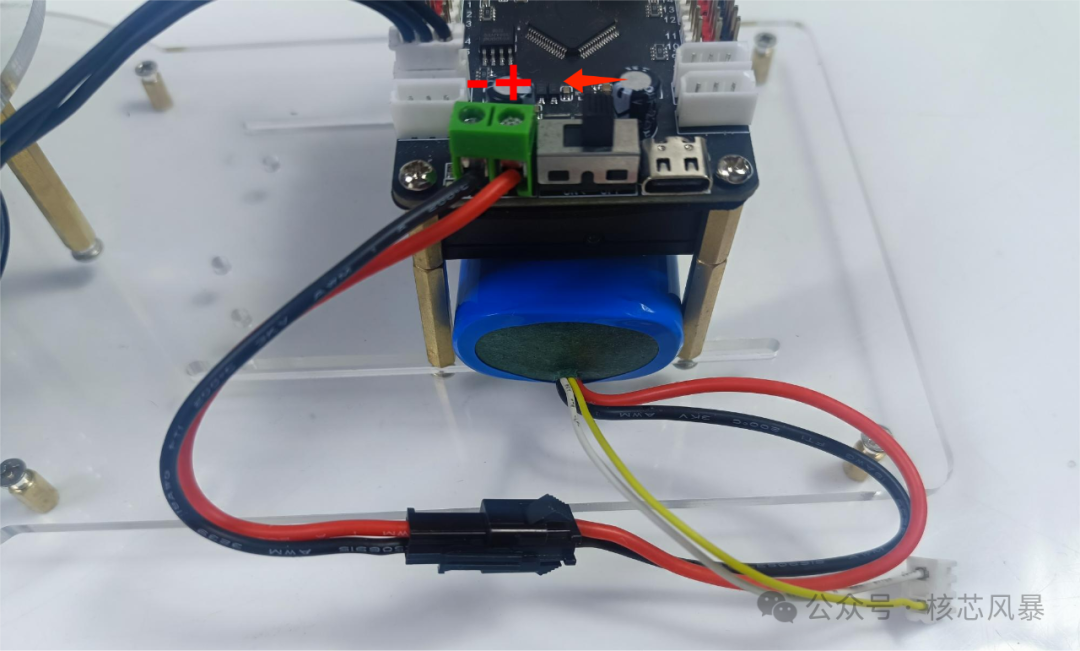
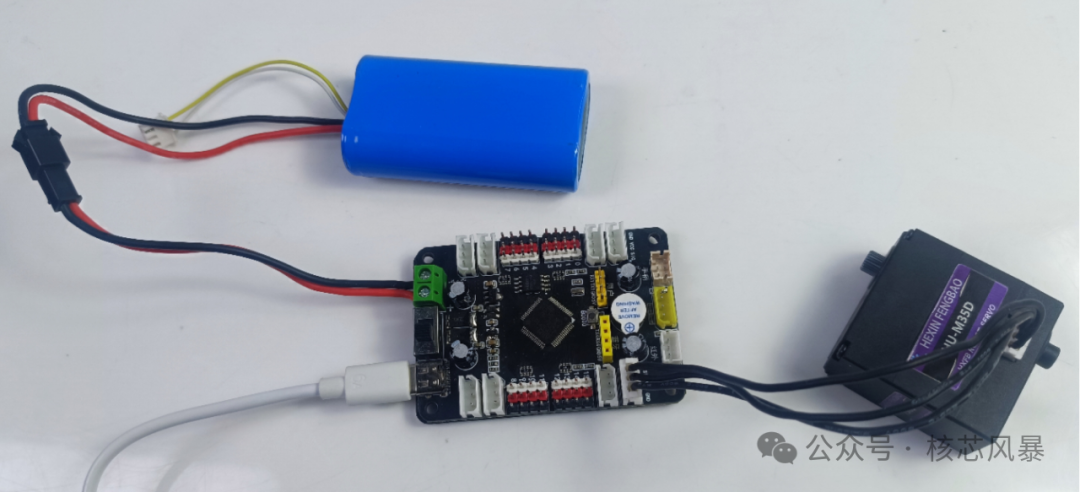
我司电池可直接接入控制板中,注意接在【电源端子】处
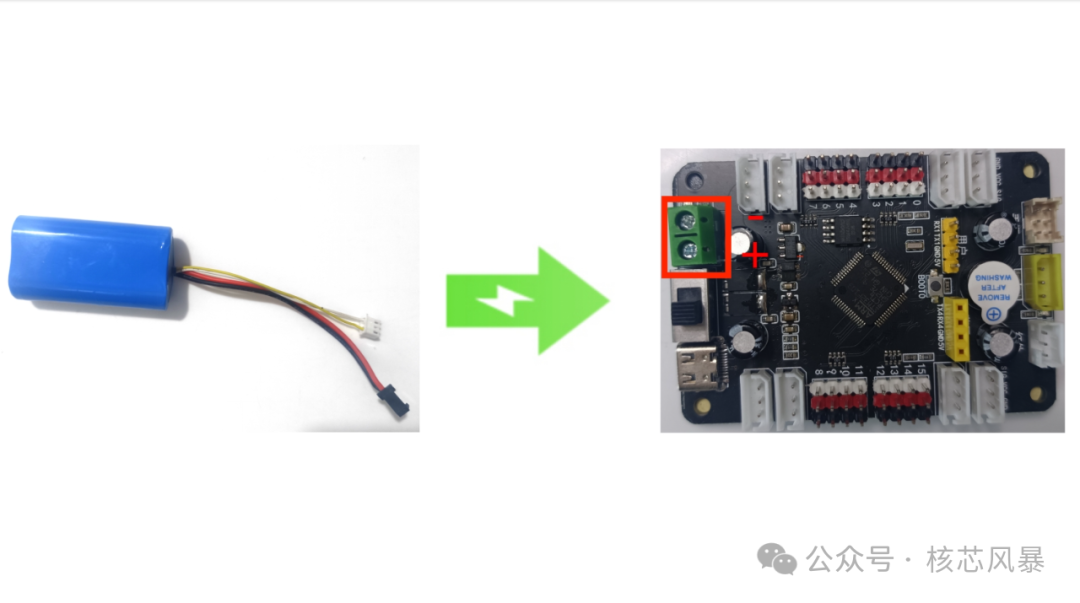
1、按照下图中方法把2P对接线公头接入电源端子内锁紧,注意正负极,红正黑负。
2、把电池放在控制板下面,把接好的公头对接线和电池的母头对接线连接在一起。
3、确认连接无误之后再打开开关(图中开关为未打开状态,把按钮推到左侧即为打开)
注:电池的供电取决于需要供电的设备需要的供电电压,电流,功率。如果乱动或控制不了,请先检查供电是否满足,电池是否是动力电池,电压,放电倍率是否满足使用需求。
第二课:HU-IDE软件的使用方法
注:所有使用到的符号均在英文输入法下输入,全部为英文符号,否则会造成命令无效。
1)在【相关工具】中找到【HU-IDE.exe】软件打开,打开后可以查看到相关的界面。
2)拿出我们的Type-C数据线,把数据线和电脑PC端连接在一起。
3)连上USB线以后,会自动连接无需驱动,连上会自动弹出“HID已连接”。如果显示为

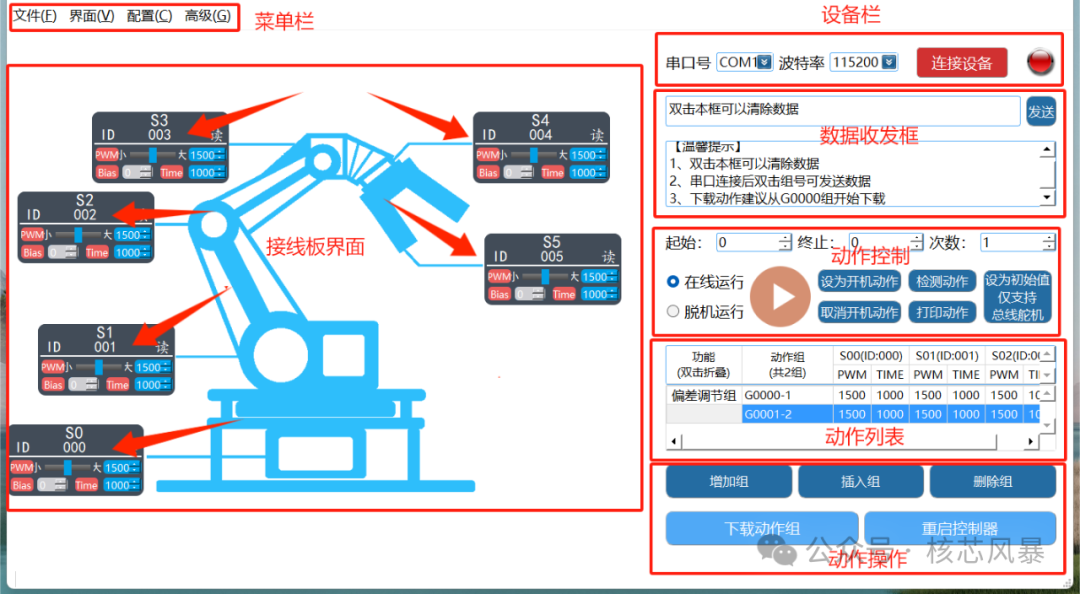
上位机软件内对应着我们实物中的机械臂ID:000为0号舵机,ID:001为1号舵机,ID:002位2号舵机,以此类推~

文件目录包含打开工程、保存工程、追加工程、导出树莓派动作组,我们在平常使用中会经常使用到打开工程和保存工程,如下图所示:
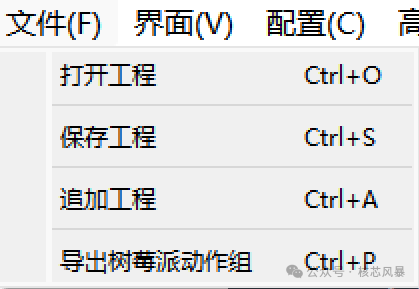
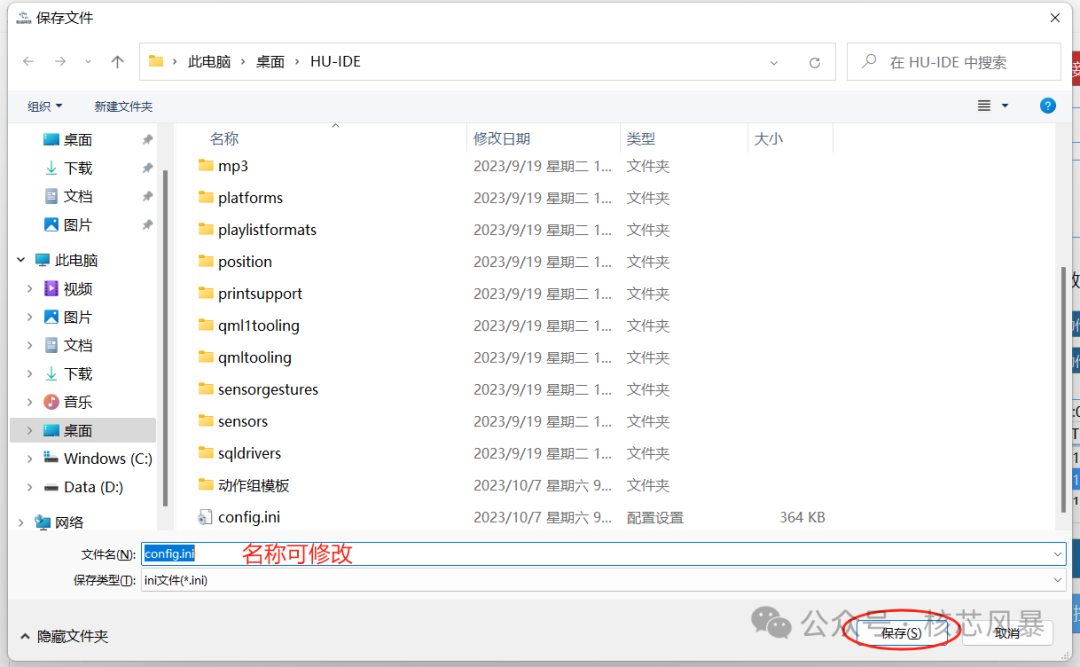
(1)一般软件会10S自动保存一次,建议大家养成保存习惯,编辑的时候经常保按下Ctrl+S
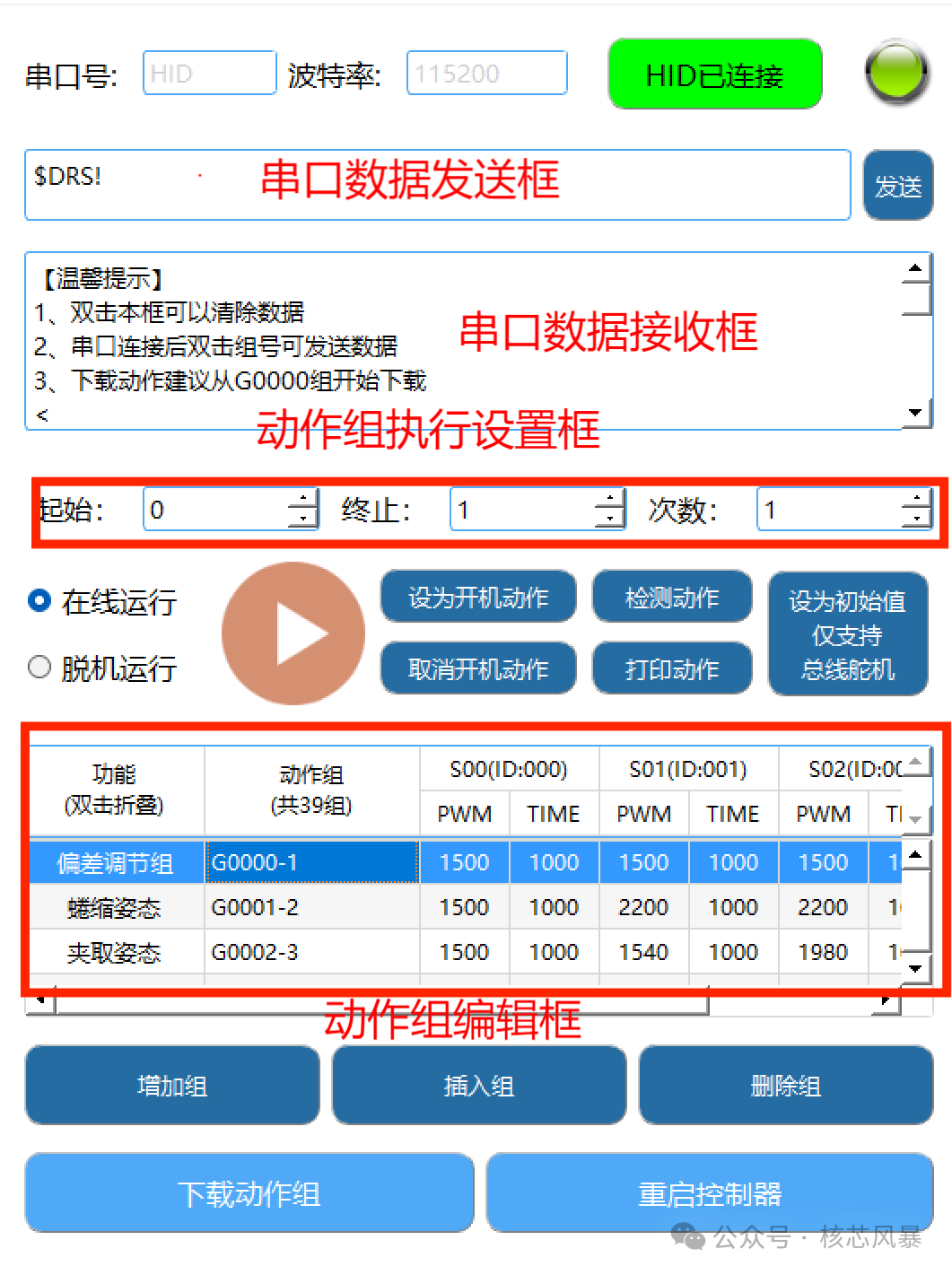
串口数据发送框:发送串口命令给控制器控制舵机等设备的使用
串口数据接收框:设备接收到串口指令后进行程序执行,有回读的会在接收框里有数据回传,查看相关数据。
动作组执行框:设置开始(从第几个动作开始)终止(从第几个动作结束)次数(执行几次,若次数为0的话,是一直循环)(图中起始为0,终止为1,次数为1,即为先执行动作组中的偏差调节组,再执行蜷缩姿态,执行一次)
在线运行:在线执行动作组执行框设置好的动作组,用来测试动作是否符合自己的要求
脱机运行:脱机执行动作组,用来测试动作组是否在控制板中
设为开机动作:将动作执行框设置好的动作组设置为开机动作
设为初始值仅支持总线舵机:将总线舵机当前位置设置为初始位置
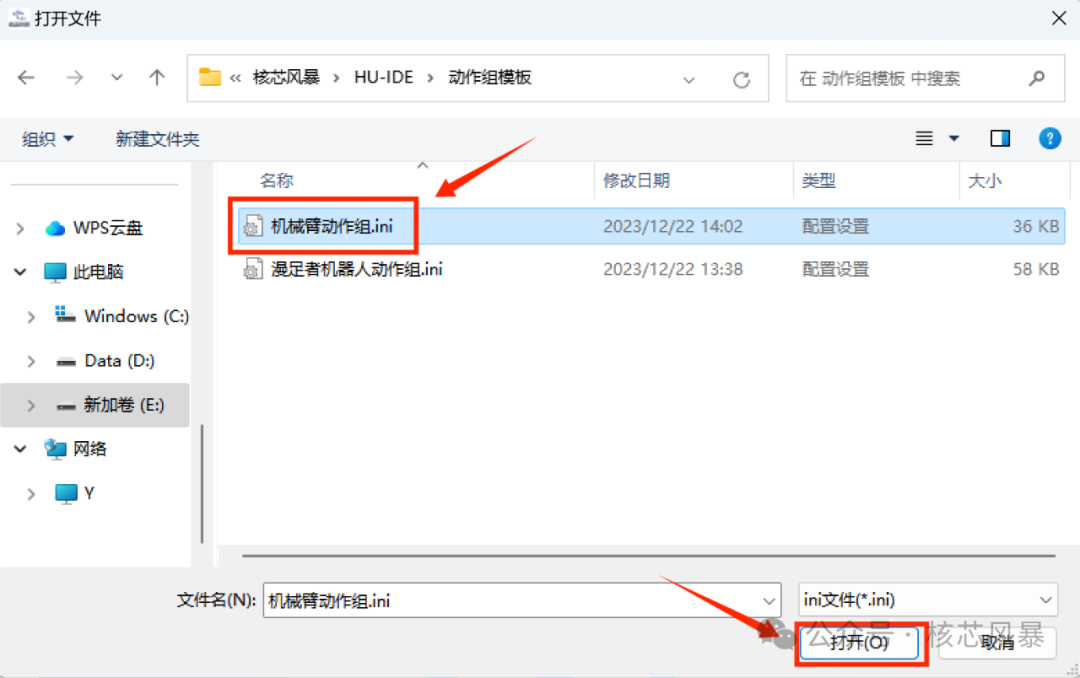
(1)打开文件之后,点击下载动作组----

(2)双击“G0001-2”即可执行对应的动作--蜷缩姿态
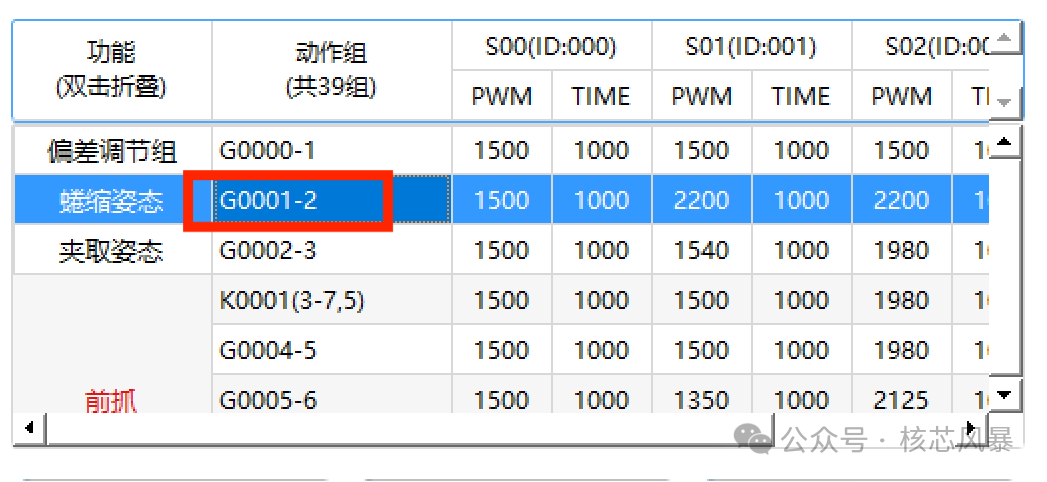
(3)点击前抓-右键-组合执行。即可执行前抓整个动作组。


【复制】:复制当前选中组的数据,粘贴后本组数据仍在
【剪切】:剪切当前选中组的数据,粘贴后本组数据消失
【粘贴】:在选中组的下一组插入刚刚复制或者剪切到的数据
【增加】:在最后一行增加一组动作,继承最后一组数据
【插入】:在选中组的下一组增加一组数据,继承选中组的数据
【下载动作组】:从选中的组开始下载,依次下载到最后一组,一般从G0000组开始下载,如需修改中间部分动作,而动作组又较多时,可从修改组开始下载,下载好需要更新的动作组后,即可点击停止,其他部分无需再次下载。
【重启控制器】:和硬件复位类似,单击时控制板从头开始执行,比如在设置开机动作后,重启控制器,就会执行相应的设置开机动作,便于测试。
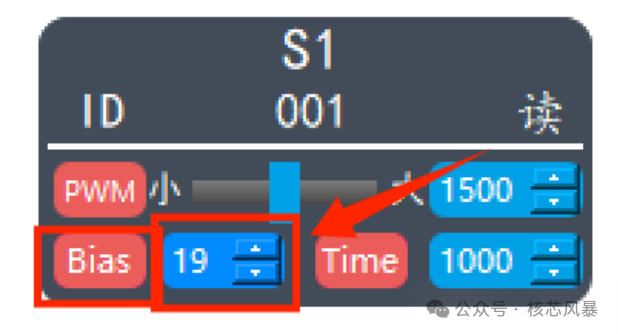
如果我们在使用过程中,打开电源开关,六轴机械臂复位,发现机械臂某个舵机略微倾斜,我们需要对这个舵机进行微调。
假如1号舵机有倾斜,点击“Bias”我们可以通过调节箭头来进行微调。完成调节之后点击“PWM”。
我们使用动作组时如果感觉动作不合适,我们需要调节单个动作组:
(1)假如需要调节蜷缩姿态,我们需要双击需要调节的动作组“G0001-2”
(3)例如我们需要调节5号舵机,我们可以调节“读”下面的数字,建议一次调节“±20”,可以进行多次调节。
(4)也可以轻拉PWM右边的滑轮,切记不可一次拉太多。

(2)双击需要PWM下面所属与“G0001-2”的行数
(3)进行更改,建议一次调节“±20”,PWM旁边的TIME为这个舵机运行的时间。1000为1000ms=1s。

了解了【HU-IDE】软件的使用方法,可以使用软件进行动作组编程,存储,调用。
注:所有使用到的符号均在英文输入法下输入,全部为英文符号,否则会造成命令无效。
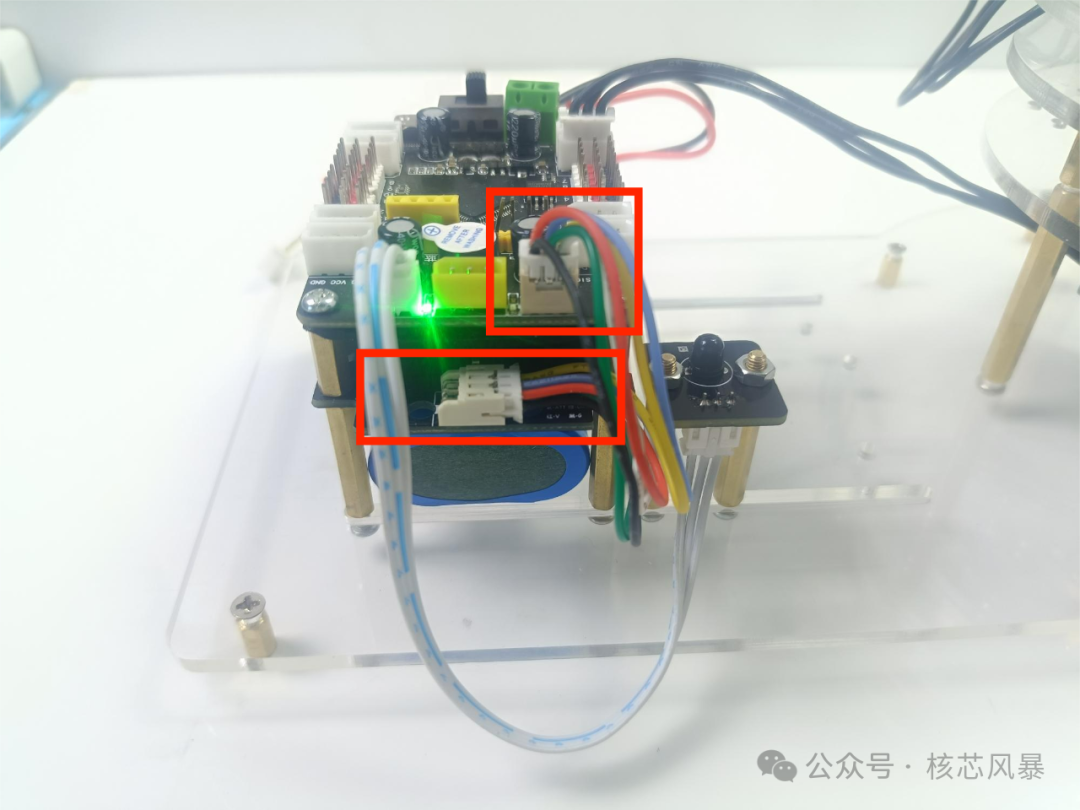
步骤一、硬件连接,使用6P连接线连接手柄接收器和控制板,连接数据线、电源线、相应执行设备。
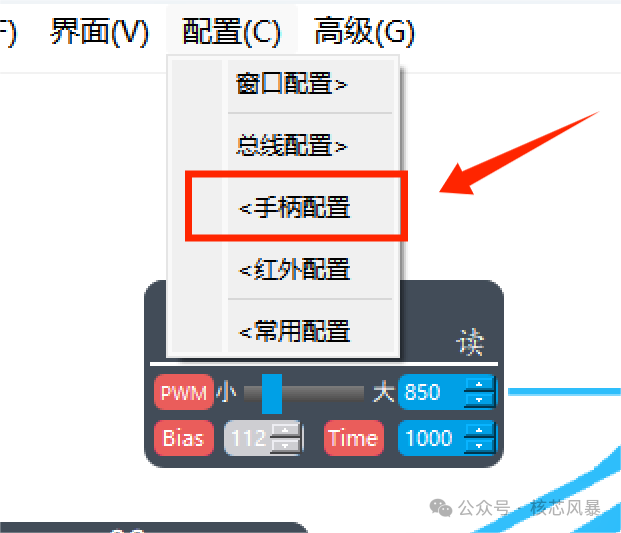
步骤二、打开HU-IDE软件,选择配置--手柄配置。
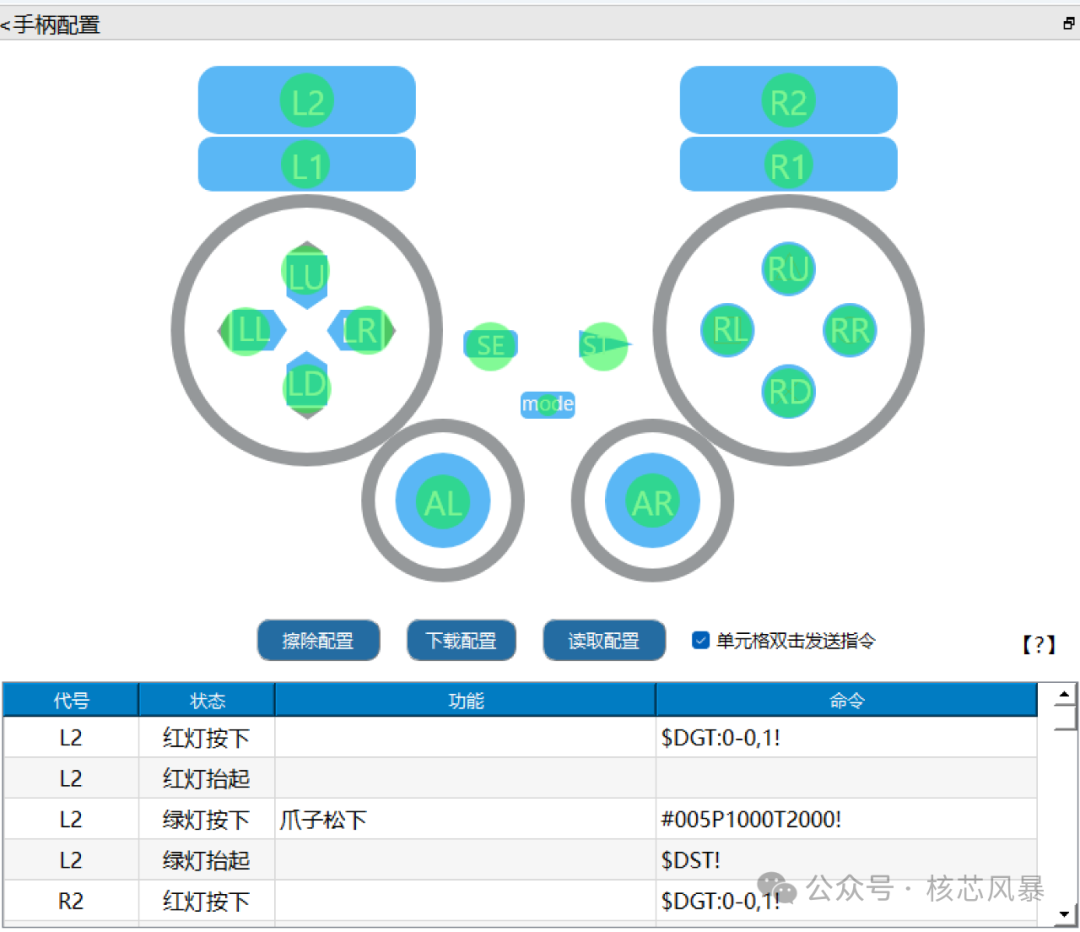
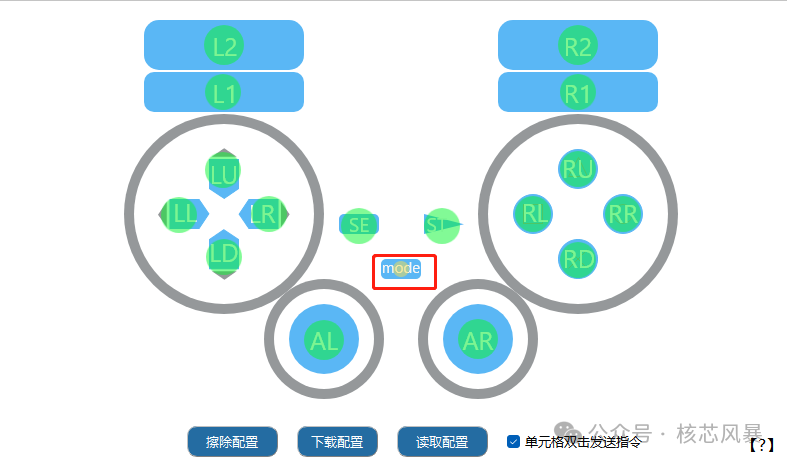
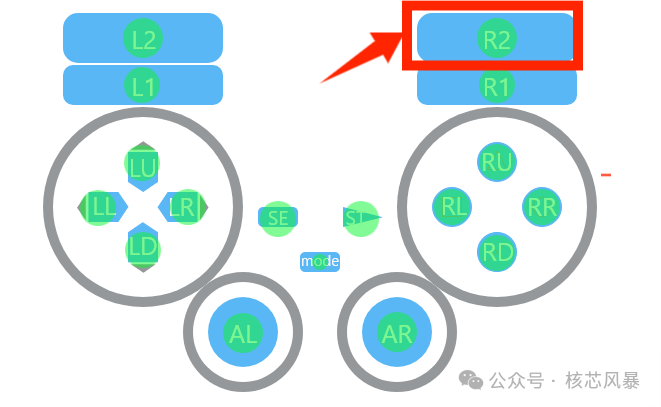
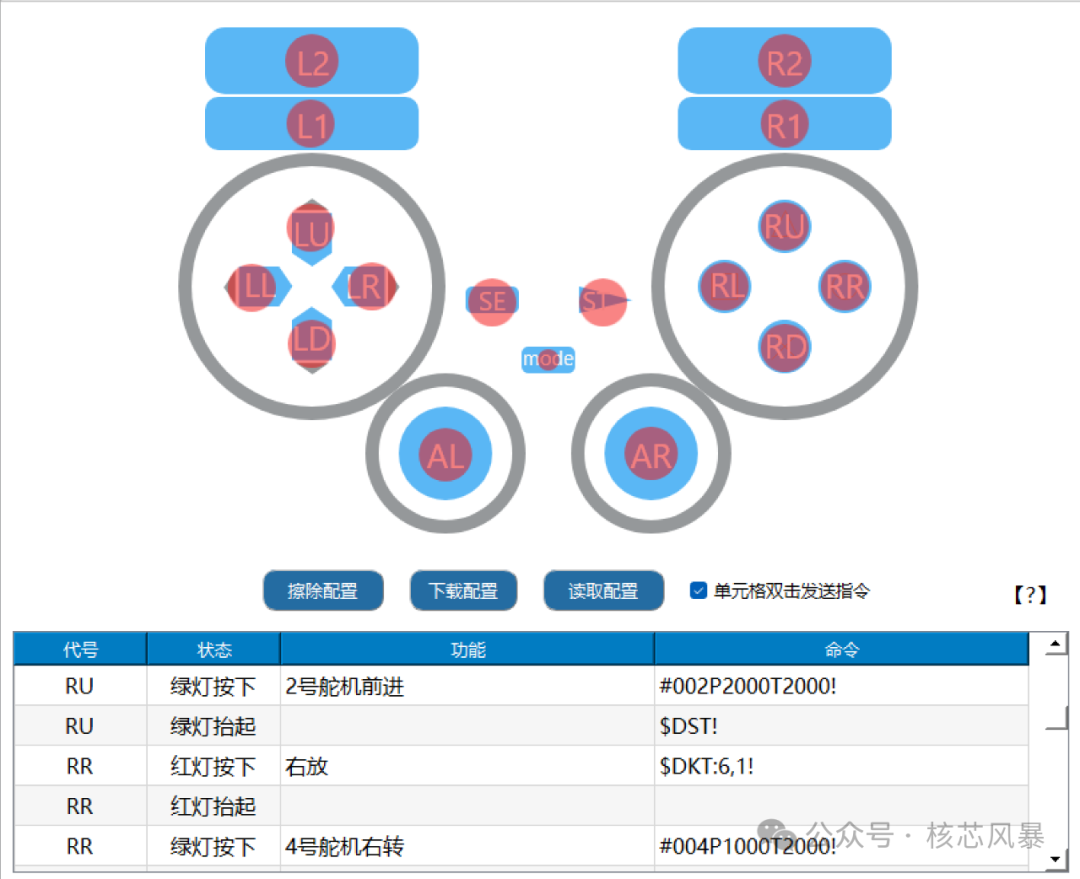
步骤四、按键功能配置,每个绿色或者红色标识处为一个按键。单击按键会弹出按键配置框,这里需要配置功能名称和命令。
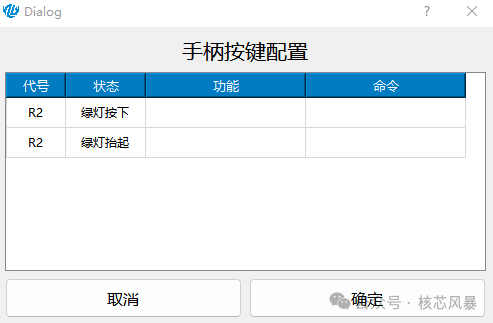
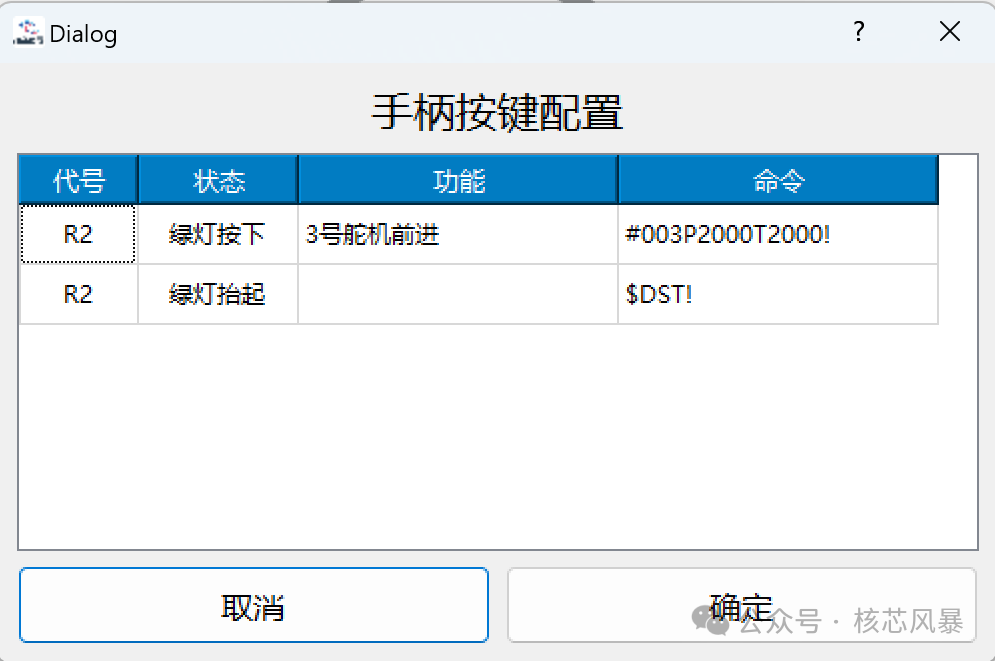
双击对应空白处输入响应内容。完成输入后点击确认键。(“#003P2000T2000!”中,#003指3号舵机,P2000指PWM值为2000,T2000指本次动作执行的时间为2000ms)(“$DST!”指所有舵机停止在当前位置)本次R2的动作即为,按下R2时3号舵机前进,松开为停止。(输入指令时,一定要为英文输入法的状态,如果指令为中文符号,则指令无效)
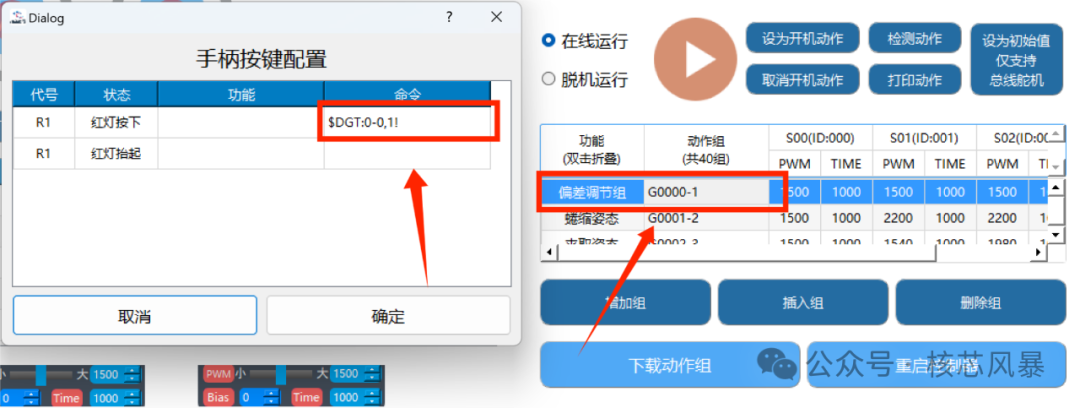
编辑动作组时,“$DGT:0-0,1”指调用动作G0000组1次,若为0次则代表循环执行。
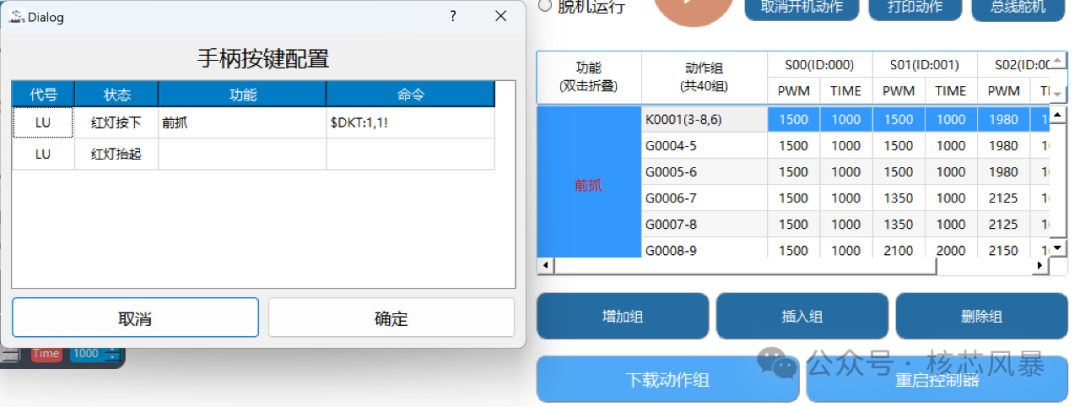
“$DKT:1,1!”指调用动作K0001组1次,若为0次则代表循环执行。(执行前抓一整套连续动作)

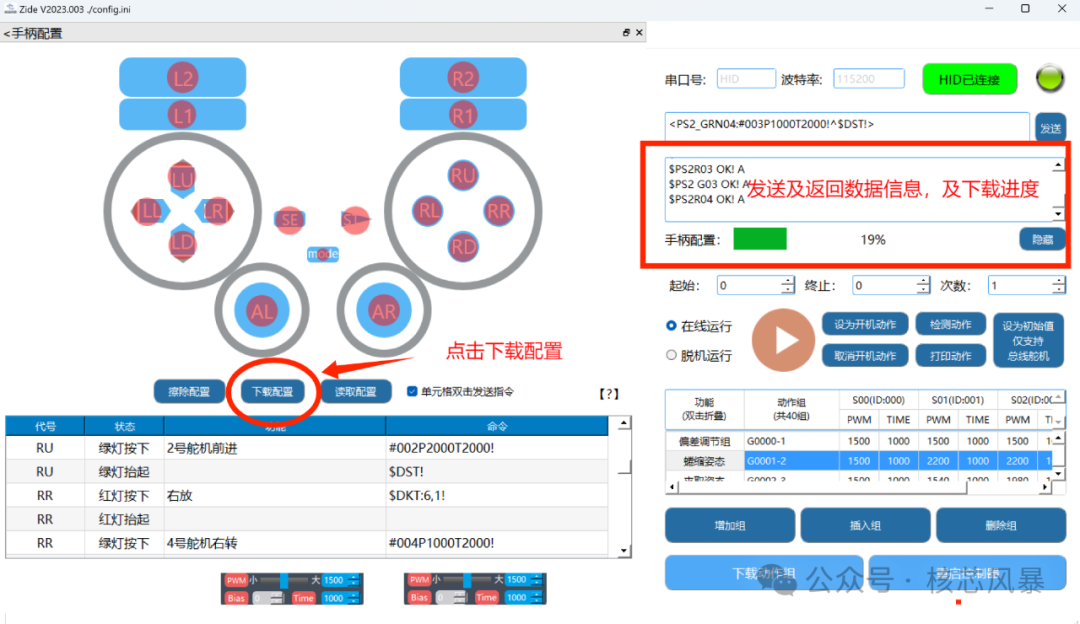
步骤六、下载配置,所有按键配置好后可以点击“下载配置”,将设置好的手柄配置下载到控制板中。
红灯模式
绿灯模式
第四课 红外遥控器配置及控制方法
注:所有使用到的符号均在英文输入法下输入,全部为英文符号,否则会造成命令无效。
步骤一、硬件连接,使用3P连接线连接红外接收头和控制板,连接数据线、电源线、相应执行设备。
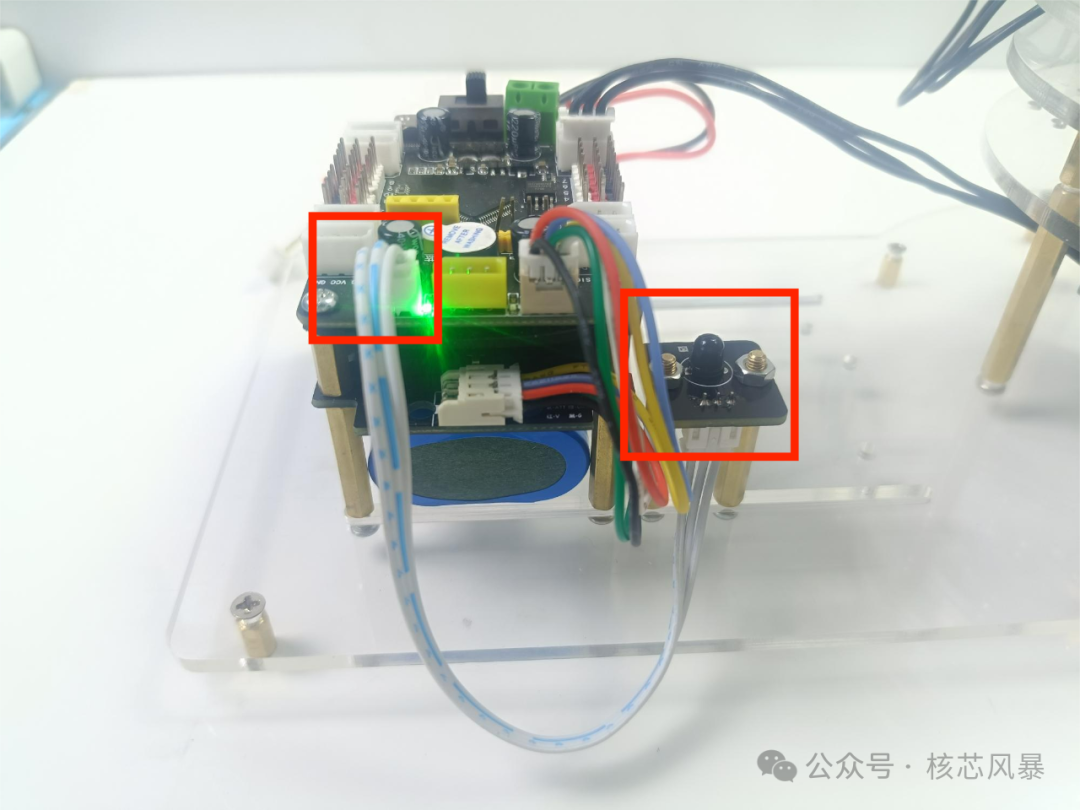
步骤二、打开HU-IDE软件,选择配置--红外配置。
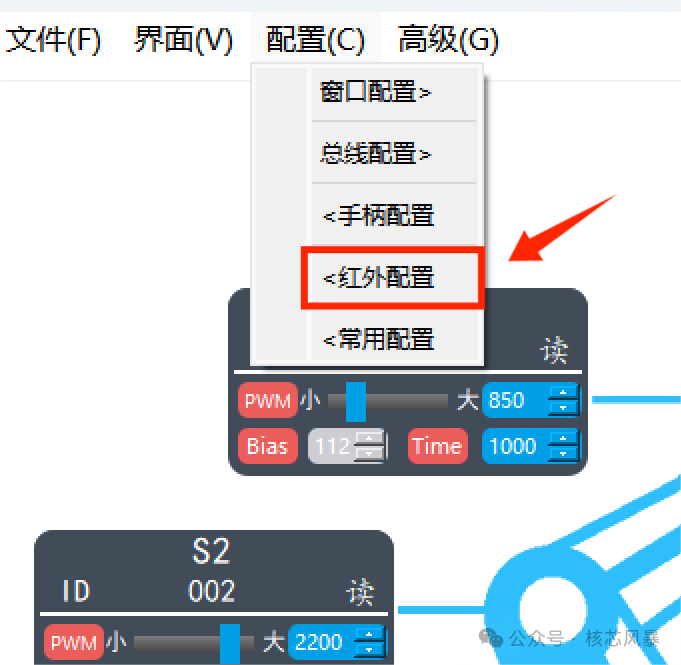

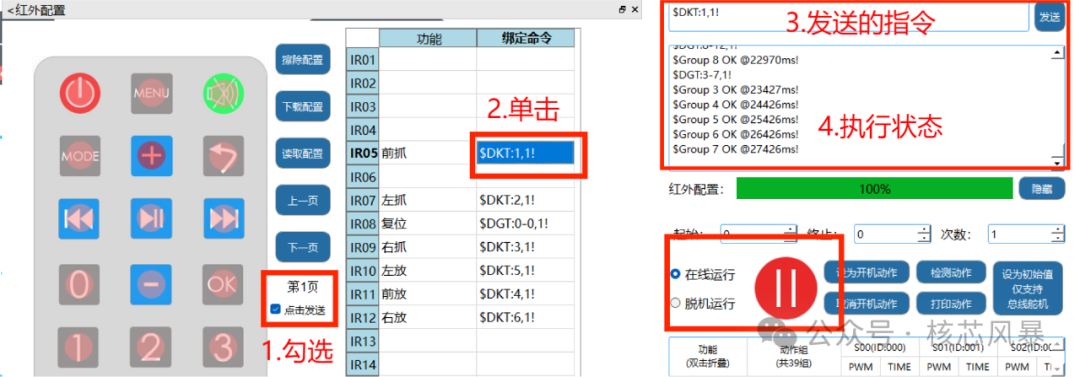
步骤三、按键功能配置在左侧,图示每个按键标识处为一个按键。单击右侧的功能栏或者绑定指令栏,左侧相应按键的红色原点会相应的亮起。

双击对应空白处输入响应内容。完成输入后点击回车键。(红外指令和手柄指令通用)

步骤四、测试执行,勾选点击发送按键,单击的绑定命令。就会将绑定的命令发送出去。
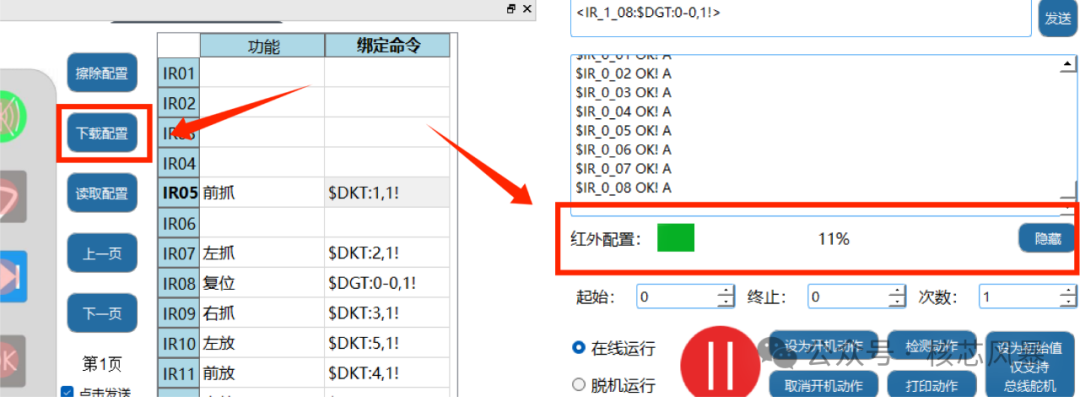
步骤五、下载配置,所有按键配置好后可以点击“下载配置”,将设置好的红外配置配置下载到控制板中。
步骤七、控制板下载动作组,使用红外遥控器进行控制。(如果红外遥控没有反应,请点击红外遥控中“MENU”,再次尝试命令,如果没有反应,请再次点击“MENU”)
【本课小结】:了解如何使用HU-IDE进行红外配置下载和红外遥控打使用。
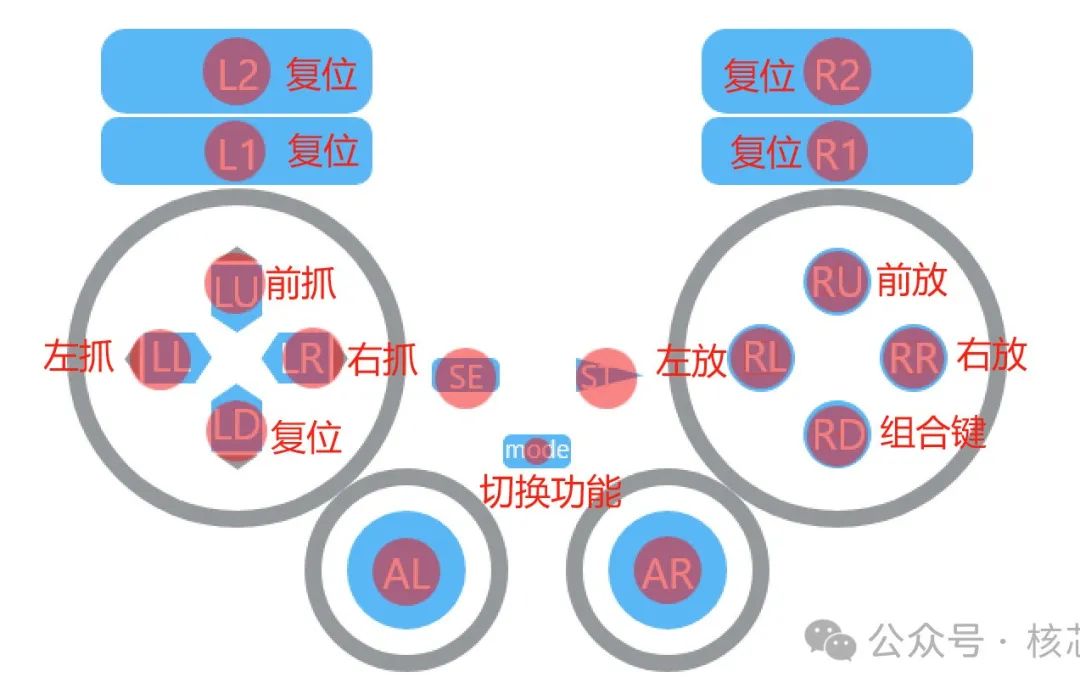
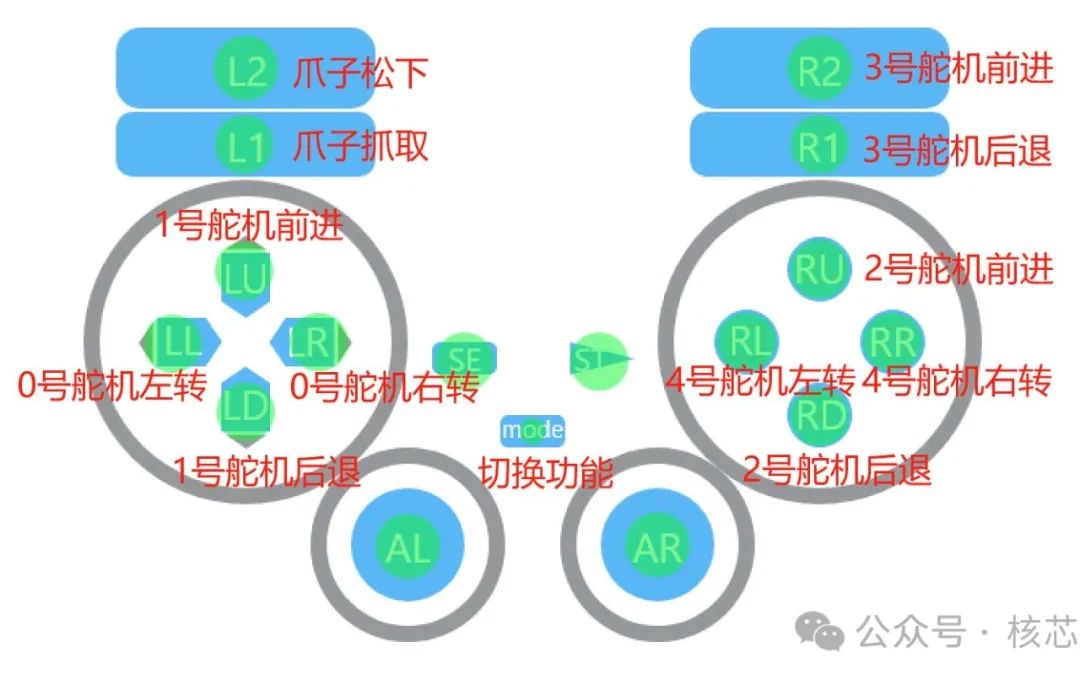
红外遥控按键示意图

在出厂情况下每个舵机上面都有对应的编号,如果舵机编号丢失或出现问题等情况,请观看以下教程:
舵机编号分为三种方式,一种为借助上位机编号,一种为借助HU-M32舵机串口调试板进行编号,最后一种为借助HU-M33舵机测试仪进行编号。
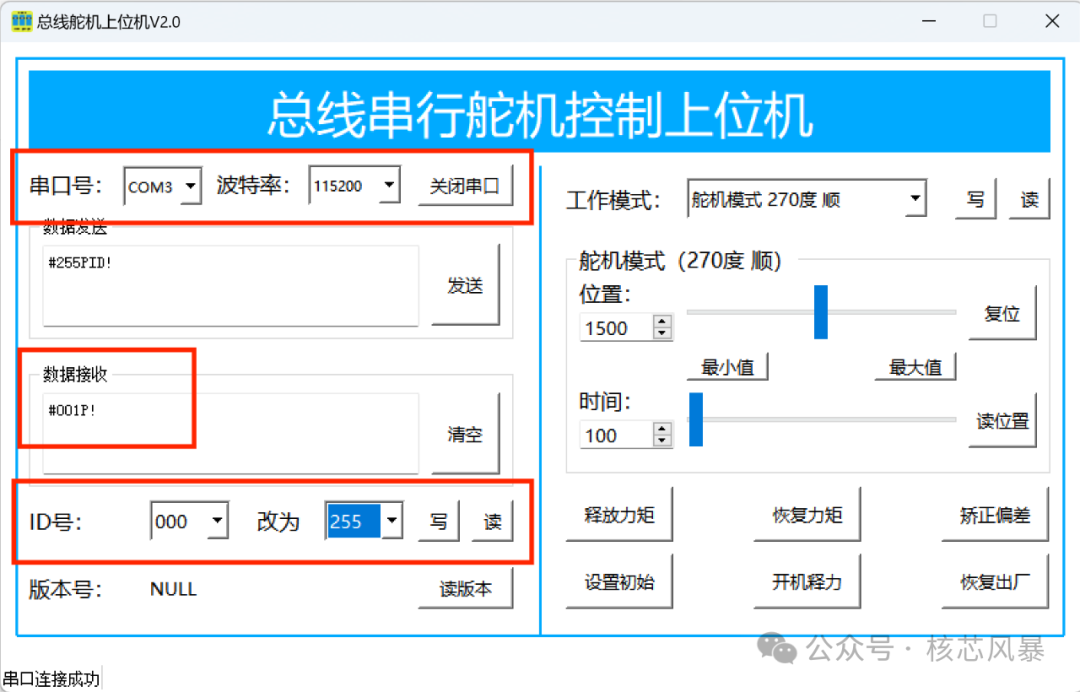
如果在使用过程中舵机上面的贴纸丢失或者等原因不知道此舵机的编号,可以用上位机进行读取编号和重新写编号。(注意电池正负极)
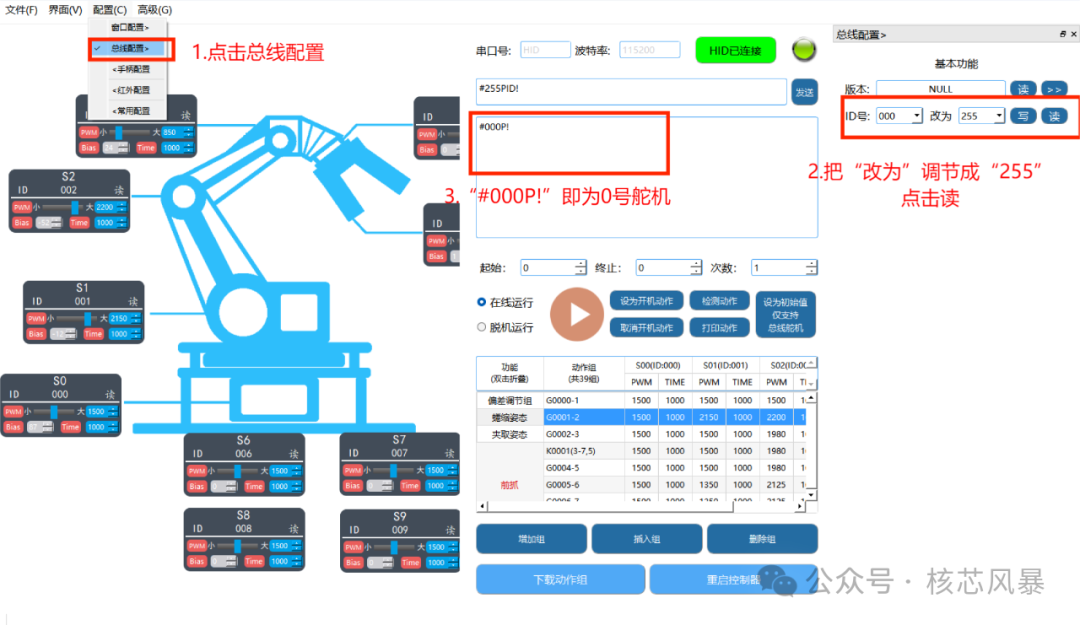
1.打开上位机软件HU-IDE,点击左上角配置-总线配置,右侧即可开始进行上位机配 置编号。
2.ID号不变,把“改为”调节“255”,点击读。
3.数据接收框里面显示“#000P!”即为0号舵机。
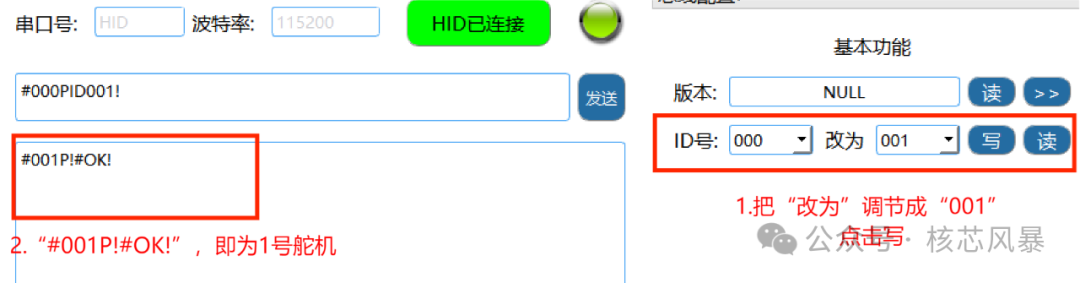
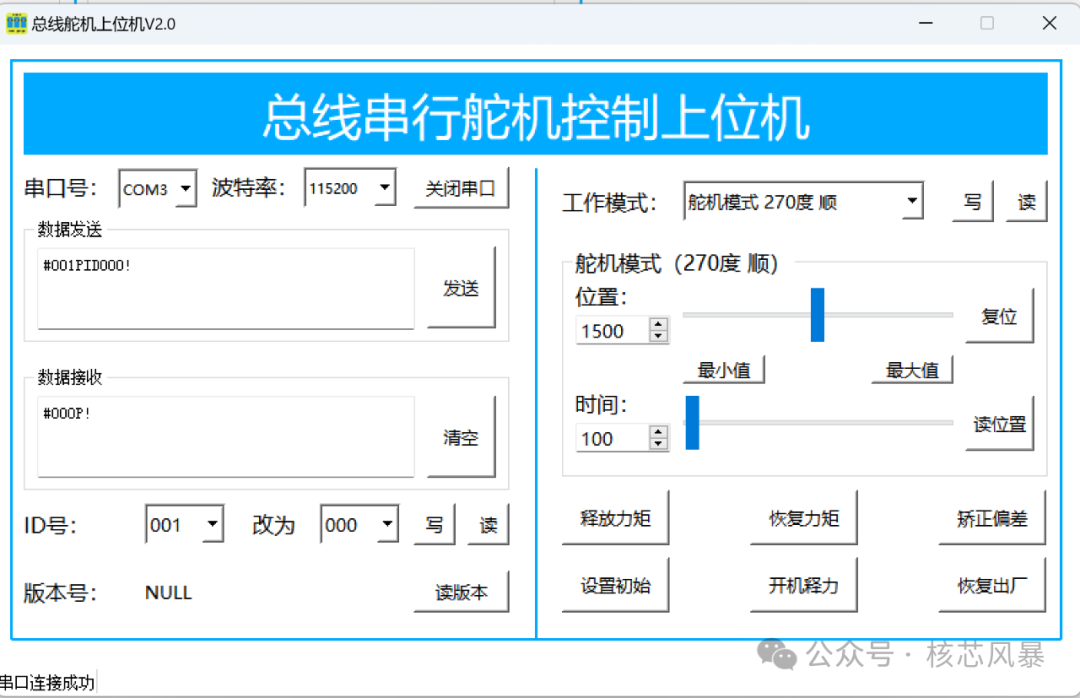
1.把0号舵机改为1号舵机,把“改为”调节成“001”,点击写。
2.数据接收框里面显示“#001P!#OK!”即为为1号舵机,编号成功。
方式二:HU-M32舵机串口调试板进行编号

如果在使用过程中舵机上面的贴纸丢失或者等原因不知道此舵机的编号,可以用HU-M32舵机测试仪进行读取编号和重新写编号。(USB转总线模式)
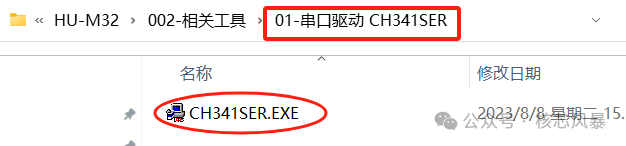
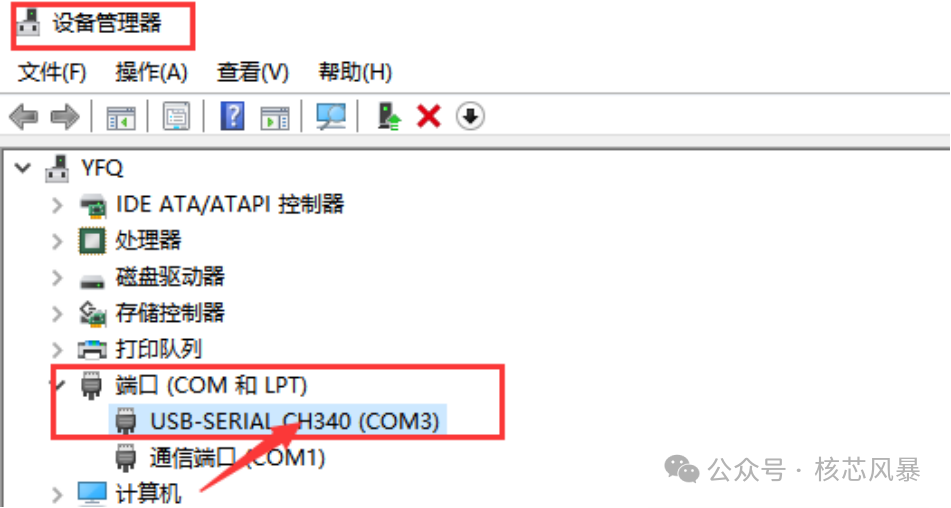
1、使用HU-M32舵机串口调试板需要先进行驱动安装,【驱动安装】:在资料找到【相关工具】->【CH340串口驱动】双击安装,在相应的产品中找到该设备的驱动,双击安装即可。
6、可以看到数据接收框显示“#001P!”,即为1号舵机。
3、数据接收框显示“#000P!”,即为0号舵机,编号成功。
方式三:HU-M33舵机测试仪进行编号
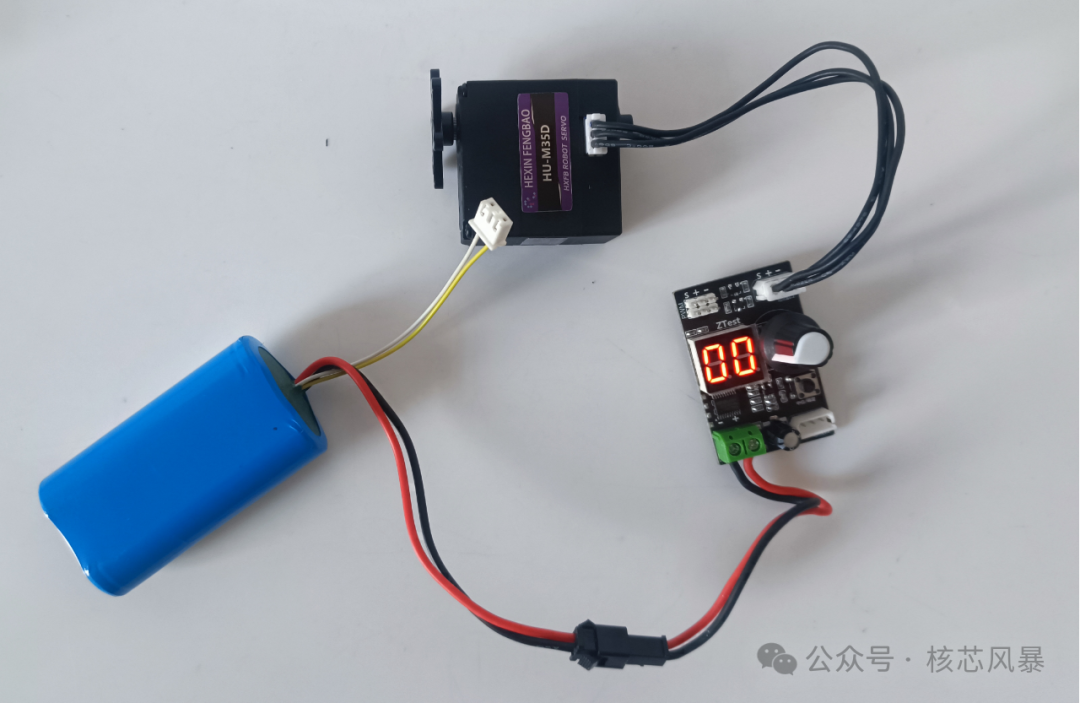
借助HU-M33舵机测试仪进行编号不需要PC电脑端上位机软件。
(1)先把电位器旋钮旋转到最左侧,然后再接上电源,注意电池正负极和舵机测试仪 电源端子正负极。
(2)如果需要对舵机编号,直接调节电位器旋钮,数码管显示相应舵机编号。
(3)按一下按键,即可对对应的舵机编号,数码管灭亮一次,即为编号成功。






























































































